相关文章

前端(十七)——gitee上开源一个移动端礼盒商城项目(前端+后台)
🤗博主:小猫娃来啦 🤗文章核心:gitee上开源一个移动端礼盒商城项目 文章目录 前言开源地址项目运行命令项目基本展示前端效果细节展示视频前端代码细节展示视频后台效果展示后台代码展示经典优势思维导图实现思路 前言
项目样式老…
编程日记
2025/2/4 11:37:44
![[ROS]虚拟机ubuntu18.04系统里面运行usb_cam](https://img-blog.csdnimg.cn/0075c472f40a49ffa79dd9e0852de06a.jpeg)
[ROS]虚拟机ubuntu18.04系统里面运行usb_cam
首先安装usb_cam
sudo apt-get install ros-melodic-usb-cam
运行:
roscore
roslaunch usb_cam usb_cam-test.launch
如果一运行报错,首先确认是否存在/dev/video0
可以使用ls /dev/video*查看,如果没有就是没有连接摄像头,…
编程日记
2025/1/28 9:05:42

alignas alignment specifier in c++
struct alignas(float) my_struct
{char x, y;
};
whatever you define the size of this struct will be in multiples of float typeis equal to
struct alignas(4) my_struct
{char x, y;
};
编程日记
2024/7/2 4:51:48
OpenSSL加解密算法使用方法
下面简单记录一下 Linux上openssl命令的使用方法,包括 OpenSSL中加解密算法的使用方法和性能测试方法,以便让新手朋友们能快速用起来。持续更新中 …
sm3算法
$ openssl sm3 /tmp/1.txt
SM3(/tmp/1.txt) baafadbe43559b7043abd1682a4e12be05692cae175…
编程日记
2024/7/2 11:31:21
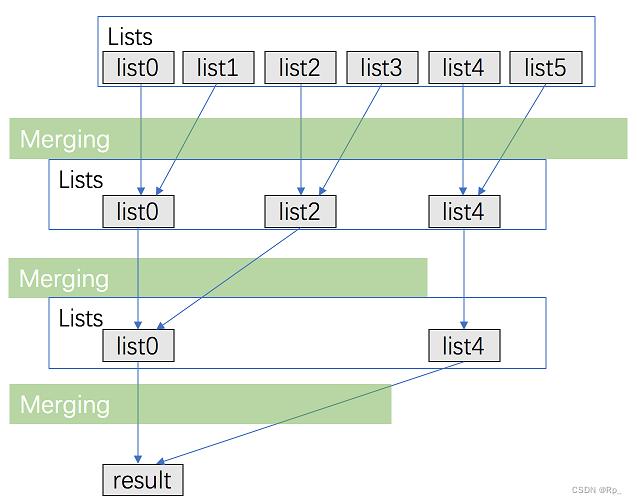
LeetCode 23 合并 K 个升序链表
LeetCode 23 合并 K 个升序链表
来源:力扣(LeetCode) 链接:https://leetcode.cn/problems/merge-k-sorted-lists/description/
博主Github:https://github.com/GDUT-Rp/LeetCode 题目:
给你一个链表数组…
编程日记
2024/9/29 2:34:17
软考高级系统架构设计师系列案例考点专题二:系统开发基础考点梳理及精讲
软考高级系统架构设计师系列案例考点专题二:系统开发基础考点梳理及精讲 一、结构化二、用例建模三、数据流图四、进度管理在考试中,涉及本章相关知识的题目为选做题,几乎每年必考1题,但是不会涉及大范围的系统分析与设计原理,而是偏向软件设计的范围,考查UML的图、关系的…
编程日记
2024/9/3 2:28:03
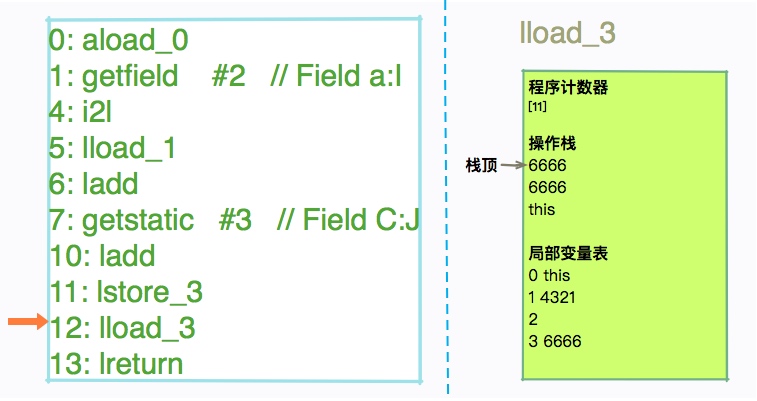
动手实践:从栈帧看字节码是如何在 JVM 中进行流转的
Java全能学习面试指南:https://www.javaxiaobear.cn/
前面我们提到,类的初始化发生在类加载阶段,那对象都有哪些创建方式呢?除了我们常用的 new,还有下面这些方式:
使用 Class 的 newInstance 方法。使用…
编程日记
2023/12/26 7:55:44
DP读书:鲲鹏处理器 架构与编程(十四)ACPI与软件架构具体调优
一分钟速通ACPI和鲲鹏软件移植 操作系统内核鲲鹏软件移植鲲鹏软件移植流程 编译工具选择编译参数移植案例源码修改案例鲲鹏分析扫描工具 Dependency Advisor鲲鹏代码迁移工具 Porting Advisor 鲲鹏软件性能调优鲲鹏软件性能调优流程CPU与内存子系统性能调优网络子系统性能调优磁…
编程日记
2025/2/5 20:18:53

