相关文章
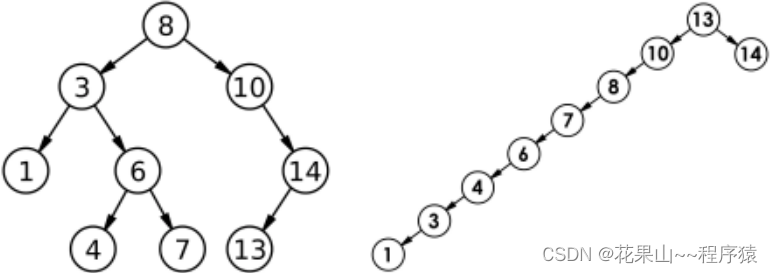
【C++】搜索二叉树底层实现
目录
一,概念
二,实现分析
1. 插入
(1.)非递归版本 (2.)递归版本 2. 打印搜索二叉树
3.查找函数
(1.)非递归版本
(2.)递归版本
4. 删除函数&#x…
编程日记
2025/1/23 21:09:17

Google Guava精讲(一)-Guava是什么?能做什么?
https://mvnrepository.com/artifact/com.google.guava/guava
作为Java栈的测试工程师,在写代码时候会频繁遇到字符串处理、缓存、反射等问题,我们最常规的做法就是,为了使原生的JDK方法好用,通常是做了一层又一层封装࿰…
编程日记
2025/1/23 21:17:07
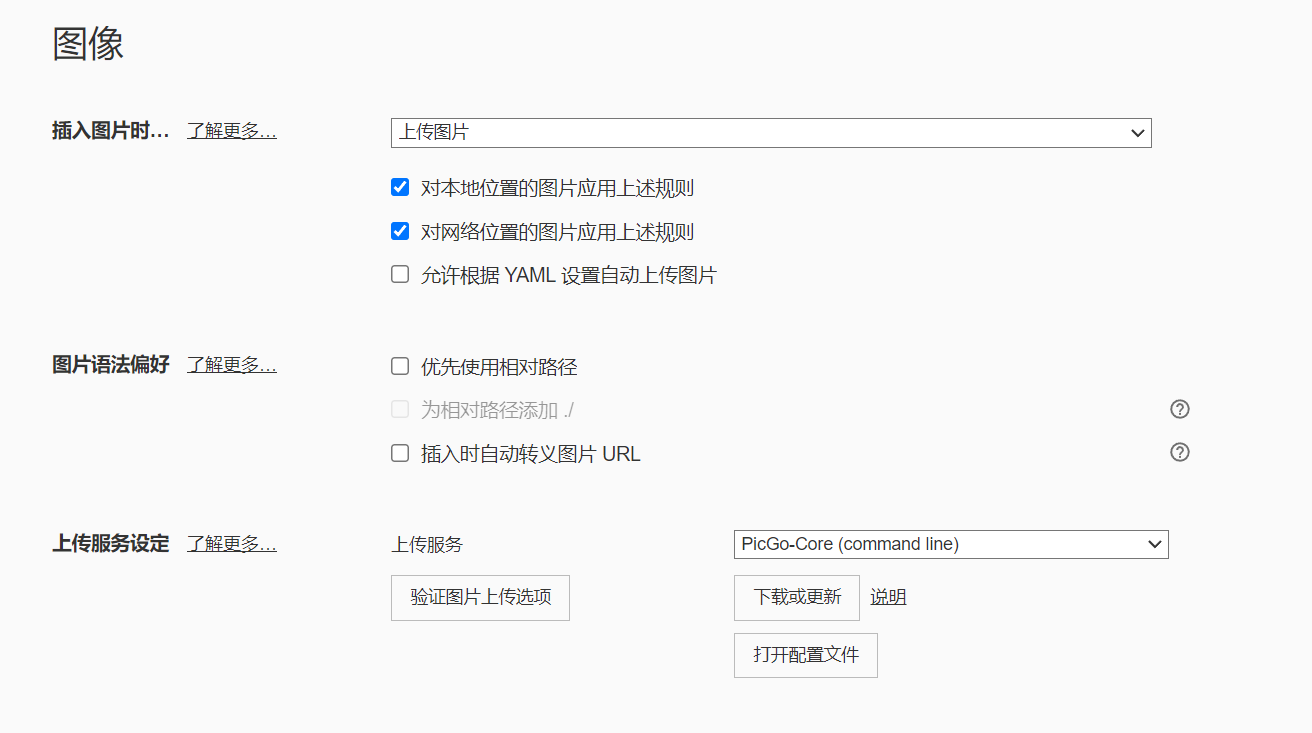
Typora偏好设置中图床的配置文件点击打开没有反应
Typora偏好设置中图床的配置文件点击打开没有反应
突然发现Typora偏好设置中图床打开配置文件点击没有反应,如下按钮所示 可能是因为系统不知道用什么软件打开json,直接进入配置文件json目录,一般位置在C:\Users\<your_user_name>\.pi…
编程日记
2025/1/21 4:20:08
CCITT 标准的CRC-16检验算法
/******该文件使用查表法计算CCITT 标准的CRC-16检验码,并附测试代码********/ #include #define CRC_INIT 0xffff //CCITT初始CRC为全1 #define GOOD_CRC 0xf0b8 //校验时计算出的固定结果值 /****下表是常用ccitt 16,生成式1021反转成8408后的查询表格****/ u…
编程日记
2025/1/20 9:35:03

Cortex-M3/M4基础
一、Cortex-M3/M4 通用寄存器
1、我们首先来了解一下M3/M4的寄存器,M4比M3多了一个浮点单元FPU。其他的部分基本和M3是一样的。
2、Cortex-M3/M4系列处理器拥有通用寄存器R0-R15以及一些特殊功能的寄存器。
3、R0‐ R12 是最“通用目的”的。
4、但是绝大多数的…
编程日记
2025/1/21 6:37:49
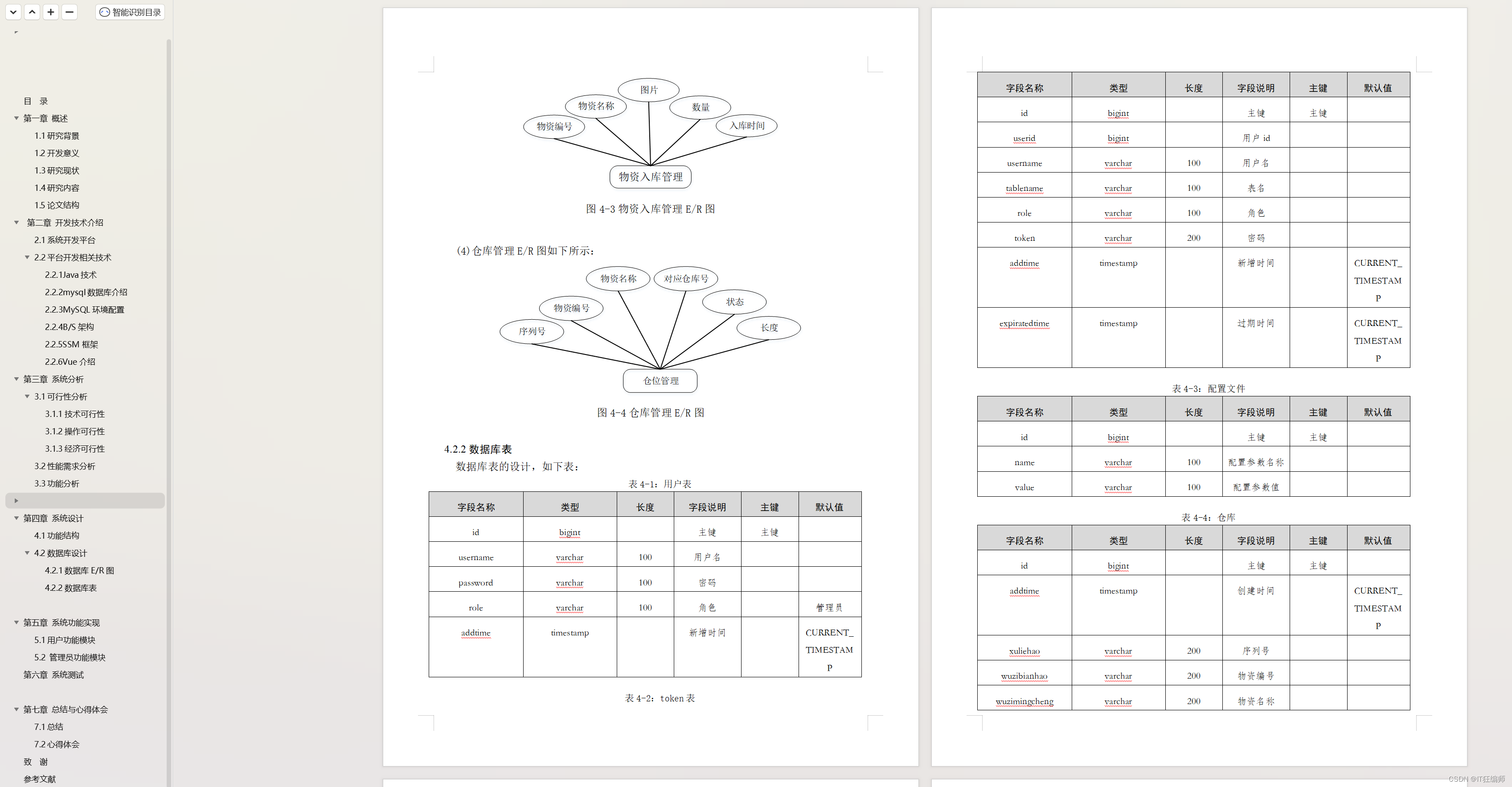
计算机毕业设计 基于SSM+Vue的物资存储系统(以消防物资为例)的设计与实现 Java实战项目 附源码+文档+视频讲解
博主介绍:✌从事软件开发10年之余,专注于Java技术领域、Python人工智能及数据挖掘、小程序项目开发和Android项目开发等。CSDN、掘金、华为云、InfoQ、阿里云等平台优质作者✌ 🍅文末获取源码联系🍅 👇🏻 精…
编程日记
2025/1/20 6:23:01

【实用干货】5大自动化测试的Python框架!
自从2018年被评选为编程语言以来,Python在各大排行榜上一直都是名列前茅。
目前,它在Tiobe指数中排名第三个,仅次于Java和C。随着该编程语言的广泛使用,基于Python的自动化测试框架也应运而生,且不断发展与丰富。
因…
编程日记
2025/1/23 7:06:58

