相关文章

强化学习环境 - robogym - 学习 - 1
强化学习环境 - robogym - 学习 - 1
项目地址
https://github.com/openai/robogym
为什么选择 robogym 自己的项目需要做一些机械臂 table-top 级的多任务操作 robogym 基于 mujoco 搭建,构建了一个仿真机械臂桌面物体操作(pick-place、stack、rearr…
编程日记
2025/3/30 5:19:19

MacOS怎么安装Nacos(附带:Windows系统)
MacOS安装Nacos(一定要配置JDK的环境变量,后面告诉你为什么?)
(1)进入Nacos官网,前往githubhomehomehttp://nacos.io/zh-cn/ (2)点击右下角的releases 然后点击Tags 选择…
编程日记
2025/3/25 9:29:57

C/C++ 二分查找面试算法题
1.二分查找(有序数组)
https://blog.csdn.net/qq_63918780/article/details/122527681
1 #include <stdio.h>2 #include <string.h>3 4 int func(int *a,int j,int x)5 {6 int len j - 1,i 0,min;7 while(i<len)8 {9 …
编程日记
2025/3/26 3:04:36

【图像处理】SIFT角点特征提取原理
一、说明 提起在OpenCV中的特征点提取,可以列出Harris,可以使用SIFT算法或SURF算法来检测图像中的角特征点。本篇围绕sift的特征点提取,只是管中窥豹,而更多的特征点算法有: Harris & Stephens / Shi–Tomasi 角点…
编程日记
2025/4/1 9:16:29
路径问题【动态规划】
一、不同路径 class Solution {
public:int uniquePaths(int m, int n) {vector<vector<int>> dp(m1,vector<int>(n1));dp[0][1] 1;for(int i 1;i < m;i){for(int j 1;j < n;j){dp[i][j] dp[i-1][j]dp[i][j-1];}}return dp[m][n];}
};
二、不同路…
编程日记
2025/3/30 4:18:32

(三) gitblit管理员手册
(一)gitblit安装教程 (二) gitblit用户使用教程 (三) gitblit管理员手册 目录 权限管理创建仓库时创建用户普通用户 管理员用户访问限制和访问权限仓库创建权限分配 Teams普通组管理员组 参考资料 权限管理
创建仓库时 选择指定的人员查看,克隆,推送
不允许fork
对应Anonymo…
编程日记
2025/4/1 1:20:10
docker-compose一键启动neo4j
下载镜像
docker pull neo4j:3.5.22-community
编写配置文件
参考文档
编写docker-compose.yml文件
version: "3"services:neo4j:image: neo4j:3.5.22-communitycontainer_name: neo4j restart: alwaysports:- 7474:7474- 7687:7687environment:- NEO4J_AUTH:ne…
编程日记
2025/3/20 9:08:15
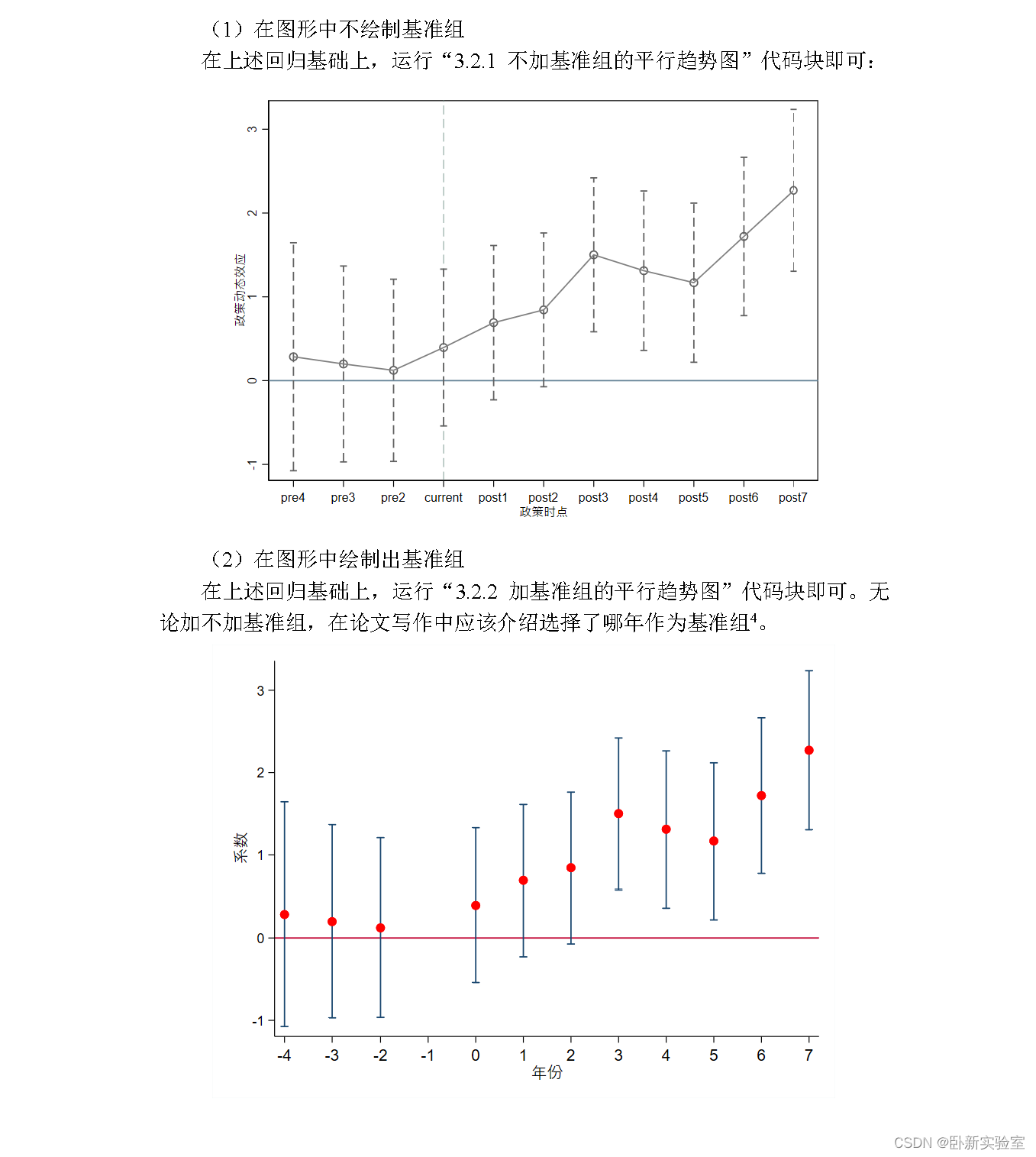
双重差分模型(DID)论文写作指南与操作手册
手册链接:双重差分模型(DID)论文写作指南与操作手册https://www.cctalk.com/m/group/90983583?xh_fshareuid60953990
简介:
当前,对于准应届生们来说,毕设季叠加就业季,写作时间显得十分宝贵…
编程日记
2025/4/2 12:12:54

