相关文章

基于Python和Tkinter的双目相机驱动界面
文章目录 前言准备工作代码分析初始化创建按钮创建图像显示区域创建信息标签启动摄像头捕捉主函数结论效果展示 前言 本文将介绍如何使用Python和Tkinter库来创建一个简单的摄像头应用程序。这个应用程序可以打开摄像头,显示摄像头捕捉的图像,并允许用户…
编程日记
2025/1/21 1:47:22

Android原生实现控件Ripple方案(API28及以上)
Android控件的水波纹效果的实现方式有很多种,比如使用ripple文件,这里介绍一下另一种Android原生的水波纹实现方案(API28及以上)。
我们利用RippleDrawable来实现一个带Ripple的Button。RippleDrawable可以通过xml 中定义 ripple…
编程日记
2025/1/23 21:37:18
MySQL基础-事务
目录
1.事务简介
2.事务的操作
2.1 实验需要用到的数据
2.2 完成转账操作
修改事务执行方式
手动开启事务的方式 3.事务的四大特性
4.并发事务问题
5.事务隔离级别
5.1 事务隔离级别分类
5.2 查看事务隔离级别
5.3 设置事务隔离级别 1.事务简介 事务是一组操作的集合…
编程日记
2025/1/18 14:17:39

OpenCV实现求解单目相机位姿
单目相机通过对极约束来求解相机运动的位姿。参考了ORBSLAM中单目实现的代码,这里用opencv来实现最简单的位姿估计. mLeftImg cv::imread(lImg, cv::IMREAD_GRAYSCALE);
mRightImg cv::imread(rImg, cv::IMREAD_GRAYSCALE);
cv::Ptr<ORB> OrbLeftExtractor …
编程日记
2025/1/21 9:18:01

CUDA学习笔记1——核函数与线程
CUDA安装并配置环境后,使用VS新建工程时会出现对应选项:
CUDA核函数调用
CUDA核函数必须用限定词 global 修饰,返回类型必须为void,二者次序随意。函数名与()之间用三括号<<<网格大小,线程块大小>>&…
编程日记
2025/1/20 13:55:23
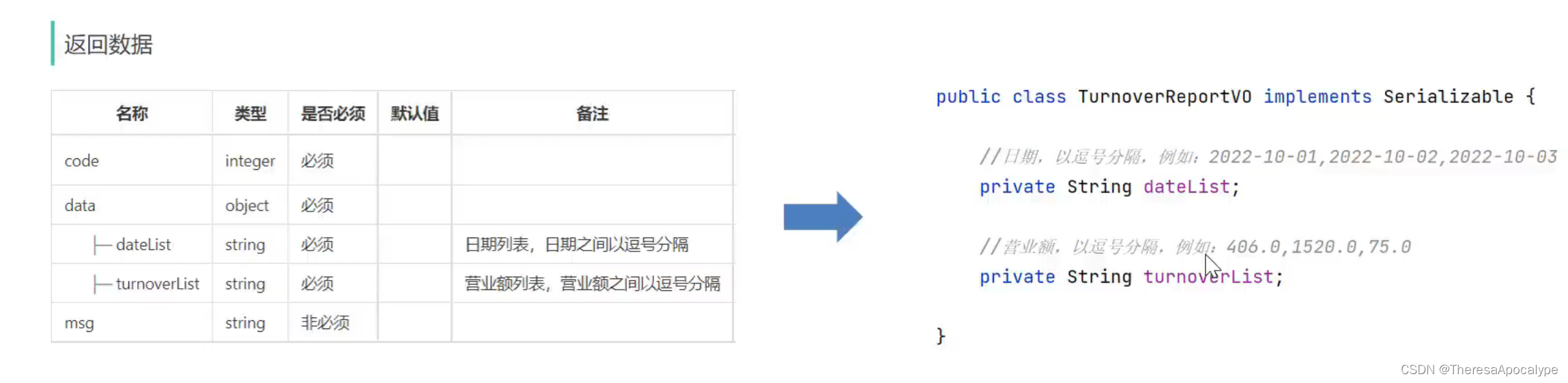
数据统计--图形报表--ApacheEcharts技术 --苍穹外卖day10
Apache Echarts 营业额统计 重点:已完成订单金额要排除其他状态的金额 根据时间选择区间 设计vo用于后端向前端传输数据,dto用于后端接收前端发送的数据 GetMapping("/turnoverStatistics")ApiOperation("营业额统计")public Result<TurnoverReportVO…
编程日记
2025/1/16 4:19:37

SpringCloud微服务(简略笔记一)
目录 介绍
编辑
认识微服务
单体架构
分布式架构
微服务分析:
分布式架构(SpringCloud微服务)
服务拆分与服务远程调用:
提供者与消费者
微服务治理
Eureka注册中心
操作步骤 Ribbon负载均衡
负载均衡流程
自定义负载均衡策略
饥饿加载 …
编程日记
2025/1/14 7:00:16

k8s 集群安装(vagrant + virtualbox + CentOS8)
主机环境:windows 11
k8s版本:v1.25
dashboard版本:v2.7.0
calico版本: v3.26.1
CentOS8版本:4.18.0-348.7.1.el8_5.x86_64
用到的脚本:
https://gitcode.net/sundongsdu/k8s_cluster 1. Vagrant创建…
编程日记
2025/1/19 9:40:33

