相关文章
导引服务机器人 通用技术条件
声明
本文是学习GB-T 42831-2023 导引服务机器人 通用技术条件. 而整理的学习笔记,分享出来希望更多人受益,如果存在侵权请及时联系我们
6 检验规则
6.1 检验项目
检验分为型式检验和出厂检验。检验项目见表2。
表 2 检验项目 序号 检验项目 技术要求 检验方法 出厂检验 型…
编程日记
2025/2/20 21:49:00
Idea JavaWeb项目,继承自HttpFilter的过滤器,启动Tomcat时部署工件出错
JDK版本:1.8 Tomcat版本:8.5 10-Oct-2023 13:55:17.586 严重 [RMI TCP Connection(3)-127.0.0.1] org.apache.catalina.core.StandardContext.startInternal One or more Filters failed to start. Full details will be found in the appropriate conta…
编程日记
2025/1/27 2:47:08

ubuntu20.04挂载拓展盘保姆级流程
背景:跑模型玩时,发现机子硬盘太小了,搞个1t固态作为挂载盘。以下为操作全流程记录
1、开始root权限操作
sudo su若进不去,考虑是否给root设置过密码,新系统第一次进入需要设置密码。
进入成功:
rooty:…
编程日记
2025/1/26 23:57:23
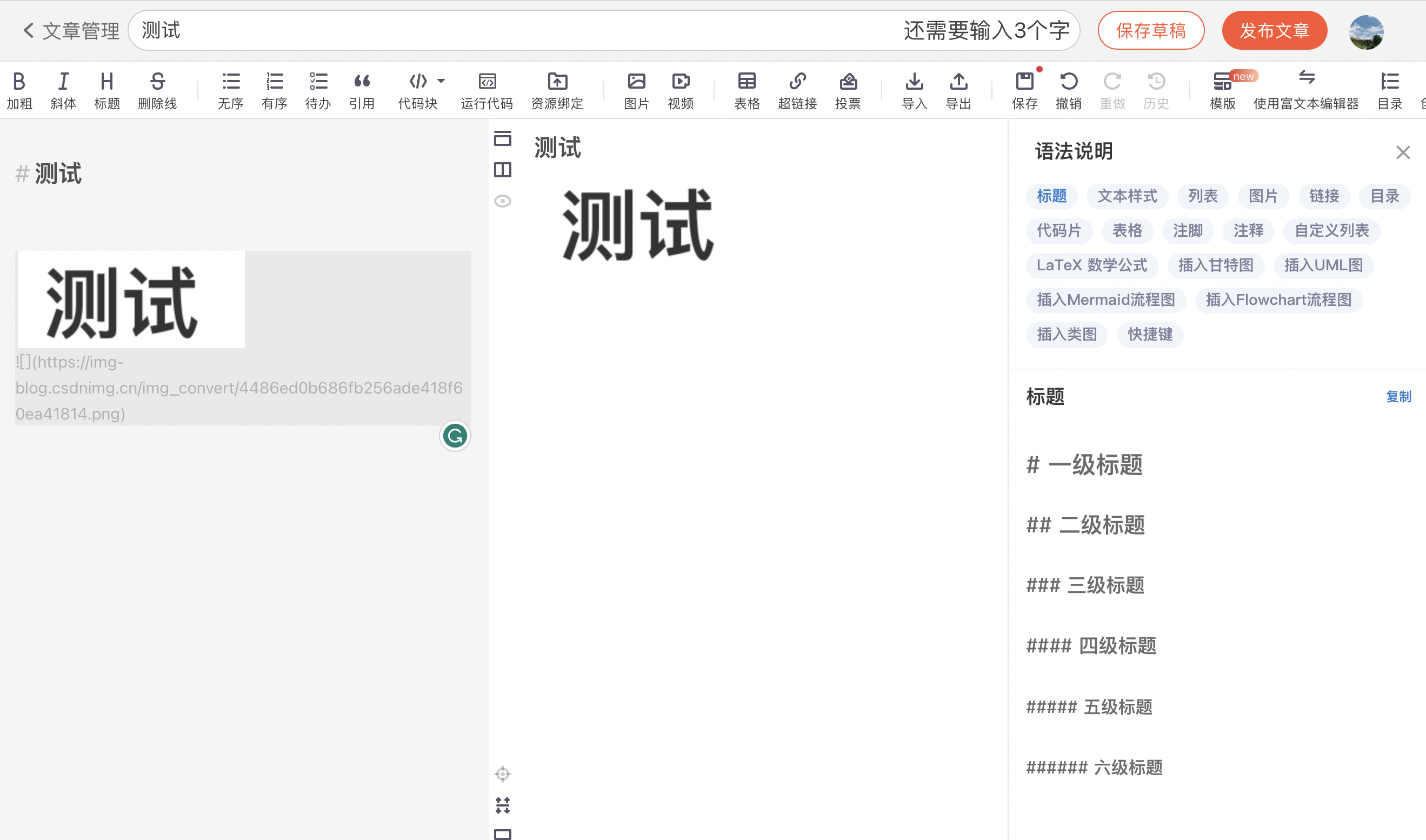
在PicGo上使用github图床解决typora上传csdn图片不显示问题(保姆级教程)
文章目录 在PicGo上使用github图床解决typora上传csdn图片不显示问题(保姆级教程)1、typora上传csdn图片不显示(外链图片转存失败)2、PicGo2.1、PicGo下载2.2、PicGo使用2.2.1、对PicGo完成基本的配置2.2.2、配置github图床2.2.3、…
编程日记
2025/2/9 3:12:12

全志R128芯片应用开发案例——驱动 WS2812 流水灯
驱动 WS2812 流水灯
本文案例代码下载地址驱动 WS2812 流水灯案例代码https://www.aw-ol.com/downloads?cat24
R128-DevKit 拥有4颗 WS2812 LED,本文将详细叙述如何点亮他们。 LEDC 模块简介 LEDC 硬件方框图如上图所示,CPU 通过 APB 总线操作 LEDC 寄…
编程日记
2025/1/23 12:08:50

C++游戏后端开发(魔兽世界,MMO,TrinityCore源码拆解) 教程
基于魔兽开源后端框架 TrinityCore 的技术拆解课程
一、TrinityCore CMake项目构建
1.1 CMake的使用 什么是CMake , CMake 的工作流程 CMakeLists.txt的编写规则 静态库生成以及链接 动态库生成以及链接 嵌套CMake
1.2 Windows和Linux下编 译调试环境搭建 cmake和grap…
编程日记
2025/2/10 18:11:18
CasA:用于点云 3D 目标检测的级联注意力网络
论文摘要
LiDAR 收集的数据通常表现出稀疏和不规则的分布。 3D 空间中的 LiDAR 扫描并不均匀。近处和远处的物体之间存在巨大的分布差距。
CasA(Cascade Attention) 由 RPN(Region proposal Network)和 CRN(cascade refinement Network&…
编程日记
2025/1/26 22:46:29

