相关文章

android 13.0 静默安装app和静默卸载app功能实现
1.概述
在13.0的产品开发中,对于调用pm的系统api实现静默安装已经受限,并且在8.0 9.0以后由于系统对于权限控制越来越严格 所以说通过adb shell 来安装卸载app都受到了限制但是又不想通过调用系统接口 弹出对话框 让用户同意后在安装 所以就需要 在系统中增加静默安装app的接…
编程日记
2025/1/22 22:03:16
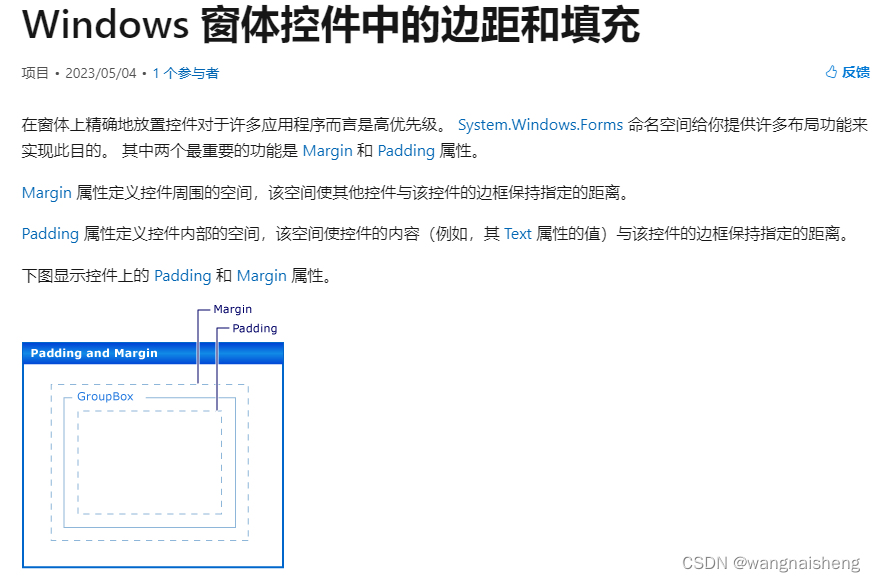
C# Windows 窗体控件中的边距和填充
可以将 Margin 属性、Left、Top、Right、Bottom 的每个方面设置为不同的值,也可以使用 All 属性将它们全部设置为相同的值。
在代码中设置Margin,元素的左边设置为5个单位、上边设置为10个单位、右边设置为15个单位和下边设置为20个单位。
TextBox myT…
编程日记
2025/1/20 9:45:32
OpenCV10-图像直方图:直方图绘制、直方图归一化、直方图比较、直方图均衡化、直方图规定化、直方图反射投影
OpenCV10-图像直方图:直方图绘制、直方图归一化、直方图比较、直方图均衡化、直方图规定化、直方图反射投影 1.直方图的绘制2.直方图归一化3.直方图比较4.直方图均衡化5.直方图规定化(直方图匹配)6.直方图反向投影 1.直方图的绘制
图像直方图…
编程日记
2025/1/21 17:50:20
![小迈物联网网关对接串口服务器[Modbus RTU]](https://img-blog.csdnimg.cn/img_convert/a3c0a1eb64f193885bc934d556235b32.png)
小迈物联网网关对接串口服务器[Modbus RTU]
很多工控现场,方案中会使用串口服务器采集Modbus RTU的设备,这种情况下一般会在PC机上装上串口服务器厂家的软件来进行数据采集。如果现场不需要PC机,而是通过网关将数据传输到软件平台,如何实现呢? 本文简要介绍小迈网…
编程日记
2025/1/18 1:04:07
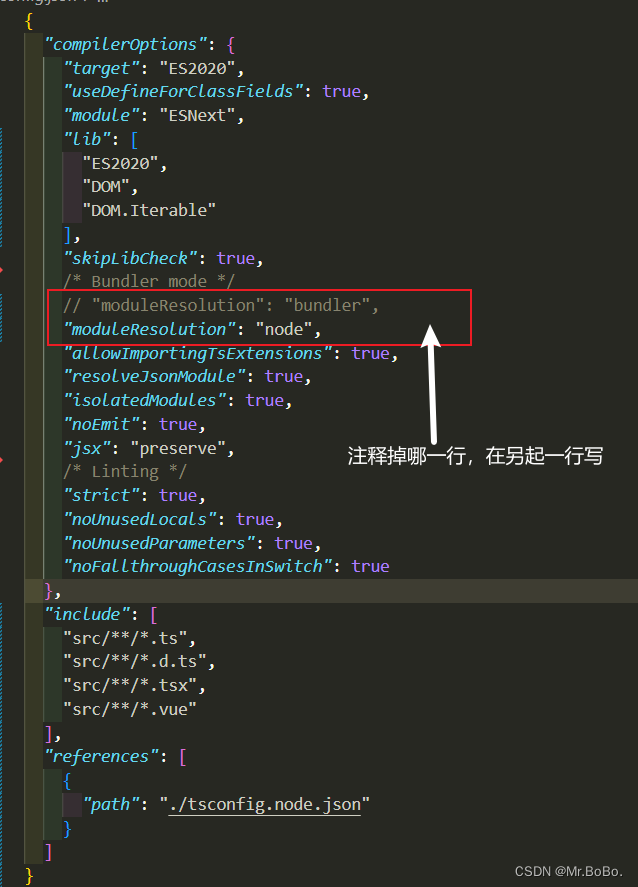
Vue3模块找不到问题解决:找不到模块‘vue ‘。你的意思是将“模块解决方案”选项设置为“节点”,还是添加ali
Vue3 vite 项目引入 vue 报错 Cannot find module ‘vue‘. Did you mean to set the ‘moduleResolution‘ option to ‘node‘, or to add ali 在项目中找到 tsconfig.json 文件
找到配置项里的 "moduleResolution": "bundler", 将其改成 &q…
编程日记
2025/1/23 9:14:02

C++day07(auto、lambda、类型转换、STL、文件操作)
今日任务
试编程:
封装一个学生的类,定义一个学生这样类的vector容器, 里面存放学生对象(至少3个)
再把该容器中的对象,保存到文件中。
再把这些学生从文件中读取出来,放入另一个容器中并且遍历输出该容…
编程日记
2025/1/22 5:46:51
机器人轨迹规划算法的研究现状
近年来,随着机器人技术的迅速发展,机器人在工业、医疗、军事等领域的应用越来越广泛。机器人轨迹规划是机器人控制的重要环节之一,它决定了机器人在执行任务时的运动轨迹,直接影响机器人的精度、速度和稳定性。因此,机…
编程日记
2025/1/24 5:11:01

Android 13.0 SystemUI修改状态栏电池图标样式为横屏显示
1.概述
在13.0的产品定制化开发中,对于原生系统中SystemUId 状态栏的电池图标是竖着显示的,一般手机的电池图标都是横屏显示的 可以觉得样式挺不错的,所以由于产品开发要求电池图标横着显示和手机的样式一样,所以就得重新更换SystemUI状态栏的电池样式了 如图: 2.SystemUI…
编程日记
2025/1/15 9:28:31

