相关文章

《PostgreSQL 开发指南》第32篇 物化视图
物化视图概述
物化视图(Materialized View)是 PostgreSQL 提供的一个扩展功能,它是介于视图和表之间的一种对象。
物化视图和视图的最大区别是它不仅存储定义中的查询语句,而且可以像表一样存储数据。物化视图和表的最大区别是它…
编程日记
2025/3/16 1:00:25
elementPlus使用el-icon
安装
# NPM
$ npm install element-plus/icons-vue
# Yarn
$ yarn add element-plus/icons-vue
# pnpm
$ pnpm install element-plus/icons-vue一、main.ts(全局注册)
import * as ElementIcons from element-plus/icons-vuefor (const key in Element…
编程日记
2025/3/15 11:20:47

比ChatGPT更强的星火大模型V2版本发布!
初体验
测试PPT生成 结果: 达到了我的预期,只需要微调就可以直接交付,这点比ChatGPT要强很多.
测试文档问答 结果: 这点很新颖,现在类似这种文档问答的AI平台收费都贵的离谱,星火不但免费支持而且效果也…
编程日记
2025/3/16 4:14:56
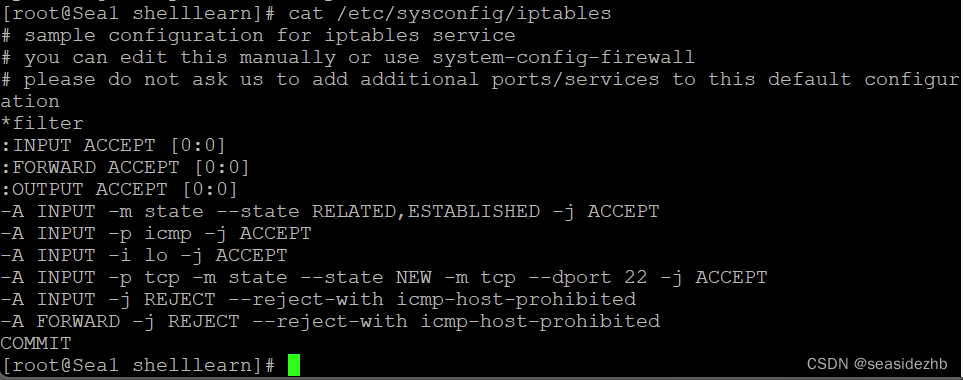
Linux学习之iptables的nat表
iptables -t nat 命令 规则链 规则是格式命令。 PREROUTING一般用于内网,用于目的地址转换。 POSTROUTING一般用于外网,用于源地址转换。 iptables -t nat -A PREROUTING -i eth0 -d 114.115.116.117 -p tcp --dport 80 -j DNAT --to-destination 10.0.0…
编程日记
2025/3/16 4:14:56

【使用教程】在Ubuntu下运行CANopen通信PMM伺服电机使用教程(NimServoSDK_V2.0.0)
本教程将指导您在Ubuntu操作系统下使用NimServoSDK_V2.0.0来运行CANopen通信的PMM系列一体化伺服电机。我们将介绍必要的步骤和命令,以确保您能够成功地配置和控制PMM系列一体化伺服电机。 NimServoSDK_V2.0.0是一款用于PMM一体化伺服电机的软件开发工具包。它提供了…
编程日记
2025/3/15 20:43:25
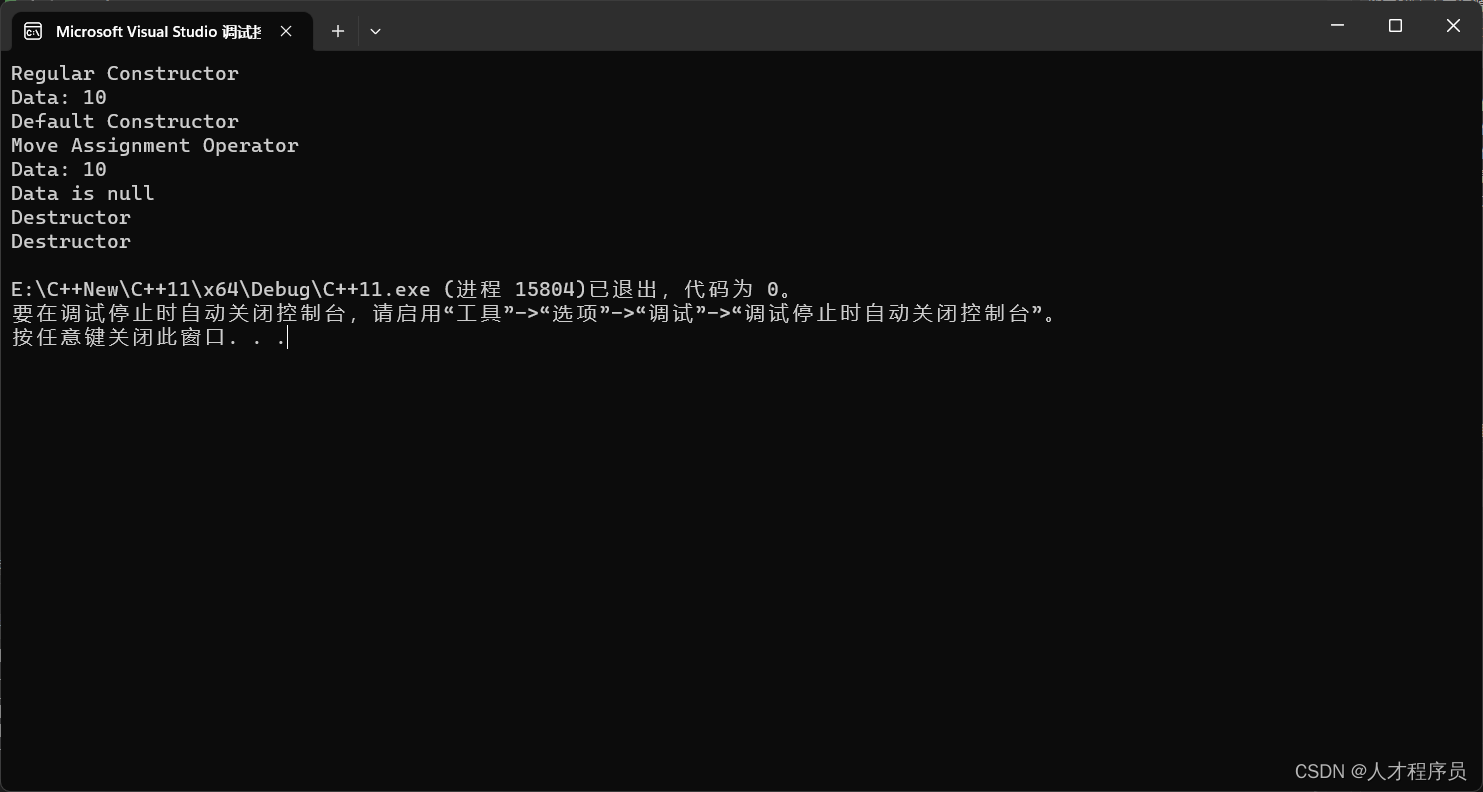
【C++11保姆级教程】移动构造函数(move constructor)和移动赋值操作符(move assignment operator)
文章目录 前言一、移动构造函数(Move Constructor)1.1 移动构造函数是什么?1.2 基本格式1.3 示例代码1.4 输出结果 二、移动赋值操作符(Move Assignment Operator)2.1 移动赋值操作符是什么?2.2 一般格式2.…
编程日记
2025/3/16 4:14:56

(五)、深度学习框架源码编译
1、源码构建与预构建: 源码构建: 源码构建是通过获取软件的源代码,然后在本地编译生成可执行程序或库文件的过程。这种方法允许根据特定需求进行配置和优化,但可能需要较长的时间和较大的资源来编译源代码。 预构建: 预…
编程日记
2025/3/14 23:54:12

