相关文章
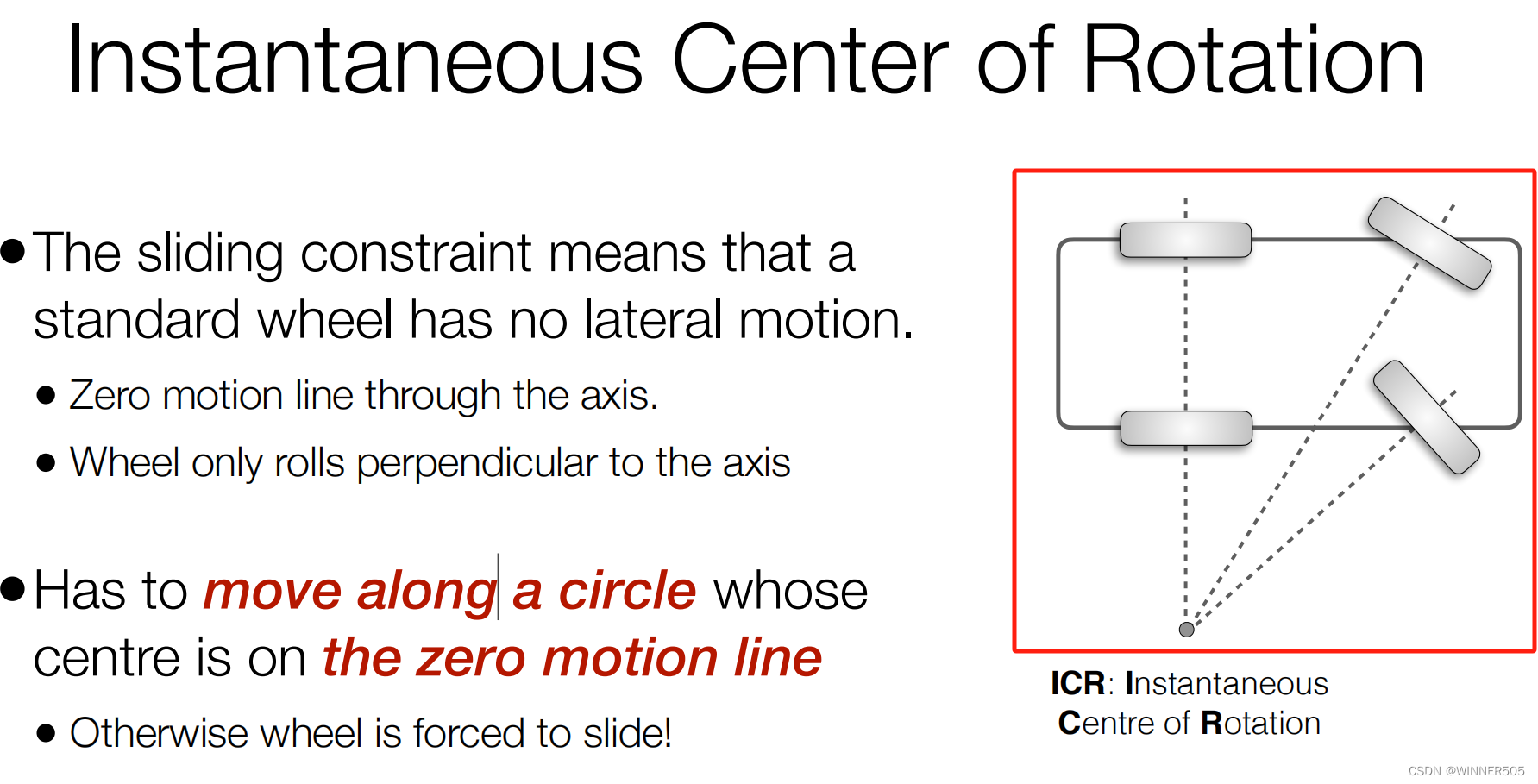
【COMP329 LEC4 Locomotion and Kinematics】
Only for the Test 1 which include 4.2 4.3 4.4 Locomotion and Kinematics 运动和运动学 (4.2) Part 2: Wheeled Motion 1. Wheeled Robots a. 省略控制双腿需要的计算复杂度 b. 只限于easy terrain (地形) c. 不平坦uneven 不规则irregular 的地形需要…
编程日记
2025/1/23 17:28:47

虚拟化 vs. 裸金属:K8s 部署环境架构与特性对比
伴随着 IT 云化转型的逐步推进,越来越多的用户加入应用容器化改造的行列,并使用 Kubernetes(K8s)进行容器部署管理。然而,令不少用户感到困惑的是,由于大部分应用此前都部署在虚拟化或超融合环境࿰…
编程日记
2025/1/18 9:16:35
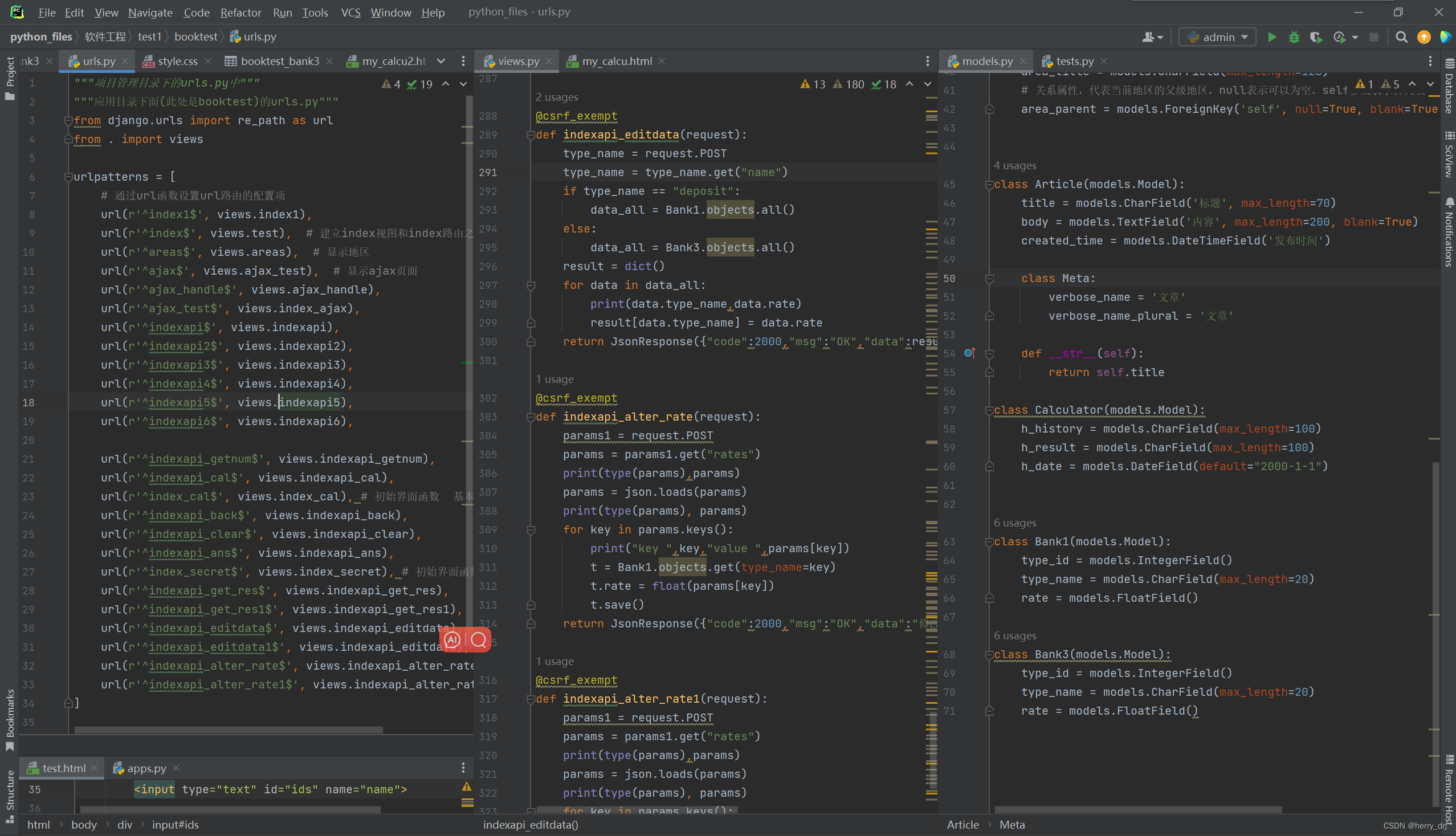
HTML+CSS+JS+Django 实现前后端分离的科学计算器、利率计算器(附全部代码在gitcode链接)
🧮前后端分离计算器 📚git仓库链接和代码规范链接💼PSP表格🎇成品展示🏆🏆科学计算器:1. 默认界面与页面切换2. 四则运算、取余、括号3. 清零Clear 回退Back4. 错误提示 Error5. 读取历史记录Hi…
编程日记
2025/1/21 4:35:28

Java面试题-Java核心基础-第十三天(序列化)
目录 一、Java序列化与反序列化是什么?
二、为什么需要序列化与反序列化?
三、序列化的实现方式有哪些?
四、什么是serialVersionUID?
五、为什么还要显示指定serialVersionUID
六、serialVersionUID什么时候修改?
七、Jav…
编程日记
2025/1/22 6:11:37
cv::solvePnP使用方法及注意点详解(OpenCV/C++)
cv::solvePnP(objectPoints, imagePoints, cameraMatrix, distCoeffs, rvec, tvec, useExtrinsicGuess, flags);
1、参数说明:
objectPoints:一个 vector<cv::Point3f>,包含了在世界坐标系中的三维点的坐标,至少需要4个点…
编程日记
2025/1/18 9:16:55
【微信小程序开发】小程序微信用户授权登录(用户信息手机号)
🥳🥳Welcome Huihuis Code World ! !🥳🥳 接下来看看由辉辉所写的关于小程序的相关操作吧 目录
🥳🥳Welcome Huihuis Code World ! !🥳🥳
授权流程讲解
一.用户信息授权登录
1.w…
编程日记
2025/1/19 18:56:19

STM32 PWM配置及呼吸灯
PWM的英文全称是"Pulse Width Modulation",中文翻译为"脉冲宽度调制"。 在PWM中可以调节的其实只有两个东西,一个叫做可调周期(调频率),另一个叫做占空比(高电平/周期)。 而…
编程日记
2025/1/22 12:21:53
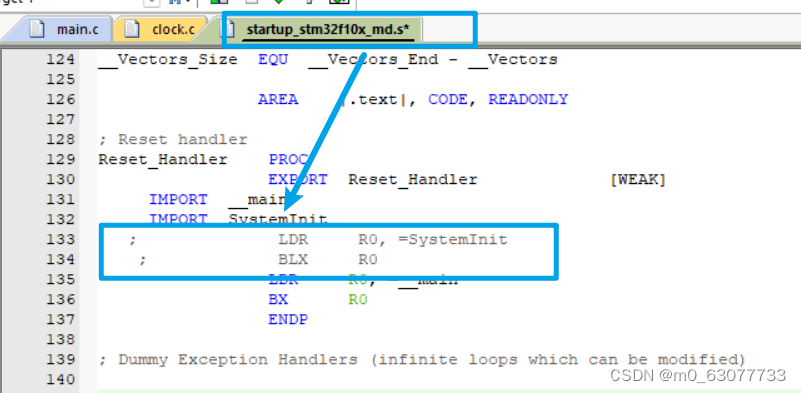
【STM32】RCC时钟模块(使用HAL库)
https://gitee.com/linhir-linhir/stm32-f103-c8/blob/master/STM32%E6%9C%80%E6%96%B0%E5%9B%BA%E4%BB%B6%E5%BA%93v3.5/Libraries/STM32F10x_StdPeriph_Driver/inc/stm32f10x_rcc.h
STM32最新固件库v3.5/Libraries/CMSIS/CM3/DeviceSupport/ST/STM32F10x/system_stm32f10x.c…
编程日记
2025/1/19 14:30:58

