相关文章
机器人仿真-gazebo学习笔记(3)URDF和机器人模型
1.URDF简介
URDF(统一机器人麦哦书格式)是ROS中的重要机器人模型描述格式,ROS提供了URDF文件的c解析器,可以解析URDF文件中使用XML格式的机器人模型。 urdf - ROS Wiki
自己查阅ros官方对URDF的介绍其实会强于大部分网上流传的文章。
1.URDF文件常用的…
编程日记
2025/1/22 13:01:49
![[架构之路-249/创业之路-80]:目标系统 - 纵向分层 - 企业信息化的呈现形态:常见企业信息化软件系统 - 产品(数据)管理](https://img-blog.csdnimg.cn/656209d4340349deabae69ad49750e8b.png)
[架构之路-249/创业之路-80]:目标系统 - 纵向分层 - 企业信息化的呈现形态:常见企业信息化软件系统 - 产品(数据)管理
目录
前言:
一、企业信息化的结果:常见企业信息化软件
1.1 产品数据管理
1.1.1 什么是产品数据管理What
1.1.1.1 常见工具
1.1.1.2 软件企业的产品数据管理系统
1.1.2 为什么需要产品数据管理系统Why?
1.1.3 谁需要产品数据管理系统w…
编程日记
2025/1/23 6:08:43
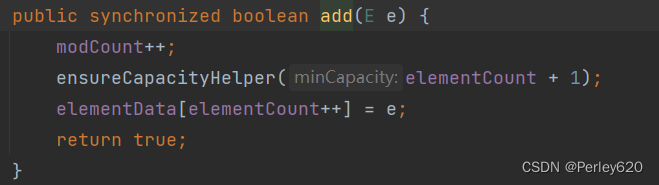
Java进阶(List)——面试时List常见问题解读 结合源码分析
前言
List、Set、HashMap作为Java中常用的集合,需要深入认识其原理和特性。
本篇博客介绍常见的关于Java中List集合的面试问题,结合源码分析题目背后的知识点。
关于的Set的博客文章如下:
Java进阶(Set)——面试时…
编程日记
2025/1/18 17:06:24
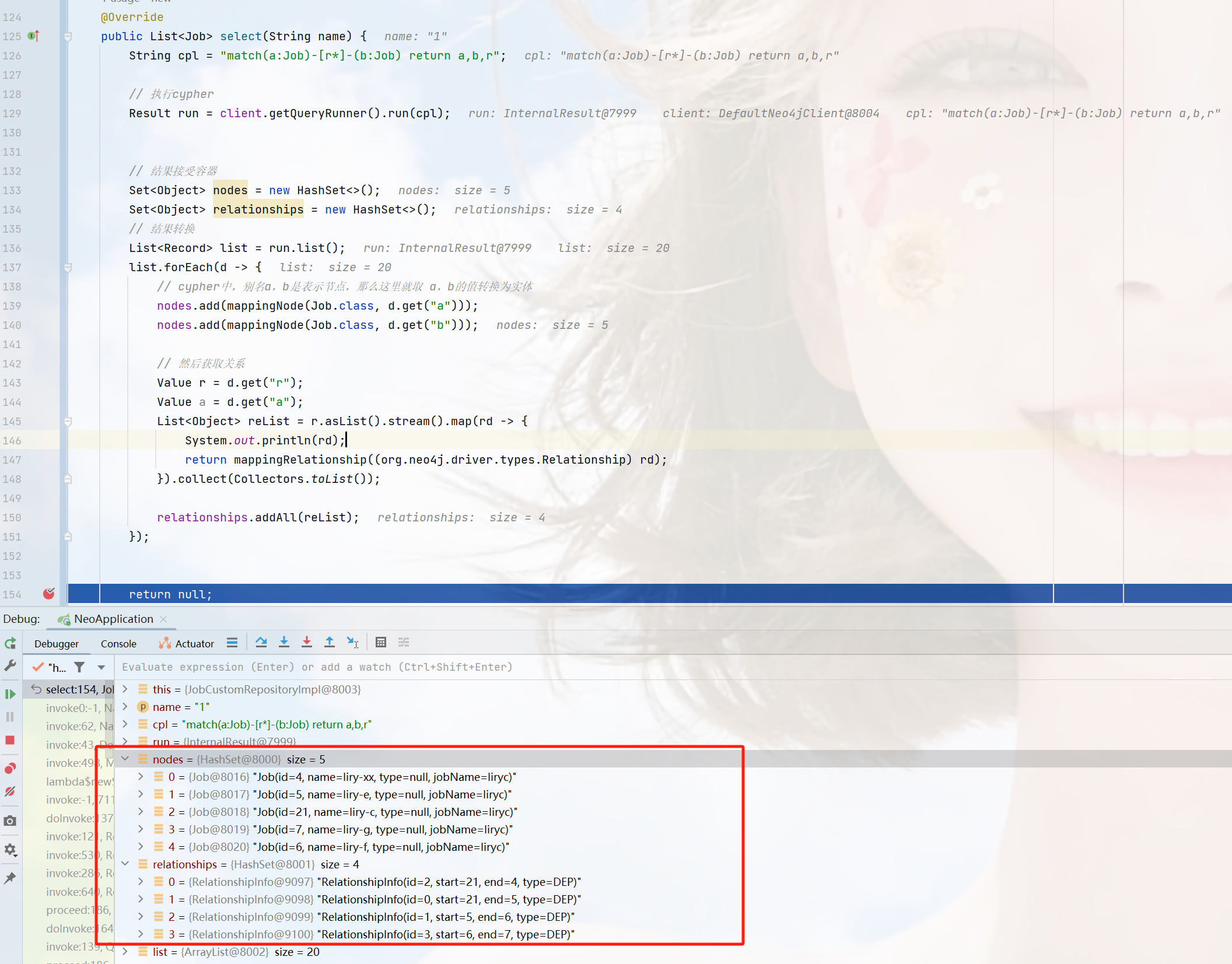
SpringBoot集成与应用Neo4j
文章目录 前言集成使用定义实体配置定义Repository查询方法方式一:Query方式二:Cypher语法构建器方式三:Example条件构建器方式四:DSL语法 自定义方法自定义接口继承自定义接口实现自定义接口neo4jTemplateNeo4jClient 自定义抽象…
编程日记
2025/1/22 16:00:08
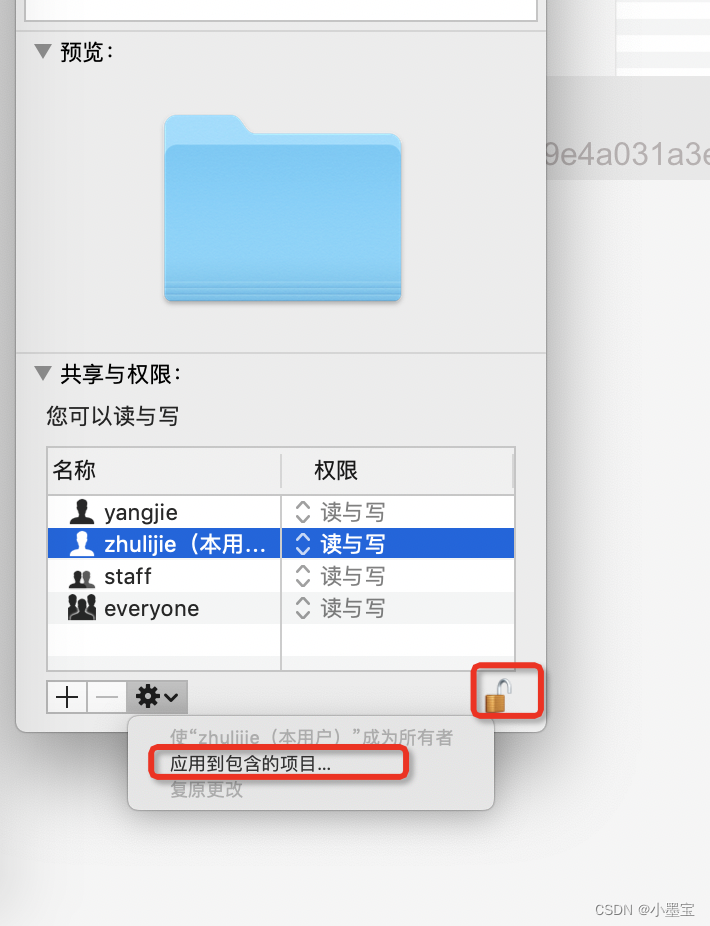
vscode 保存 “index.tsx“失败: 权限不足。选择 “以超级用户身份重试“ 以超级用户身份重试。
vscode 保存 "index.tsx"失败: 权限不足。选择 “以超级用户身份重试” 以超级用户身份重试。 操作:mac在文件夹中创建文件,sudo 创建umiJs项目 解决:修改文件夹权限 右键文件夹
编程日记
2025/1/23 23:29:13

计算机毕业设计选题推荐-二手交易微信小程序/安卓APP-项目实战
✨作者主页:IT研究室✨ 个人简介:曾从事计算机专业培训教学,擅长Java、Python、微信小程序、Golang、安卓Android等项目实战。接项目定制开发、代码讲解、答辩教学、文档编写、降重等。 ☑文末获取源码☑ 精彩专栏推荐⬇⬇⬇ Java项目 Python…
编程日记
2025/1/23 4:01:47

flask socketio 实时传值至html上【需补充实例】
目前版本如下
Flask-Cors 4.0.0
Flask-SocketIO 5.3.6from flask_socketio import SocketIO, emit 跨域问题网上的普通方法无法解决。
参考这篇文章解决
Flask教程(十九)SocketIO - 迷途小书童的Note迷途小书童的Note (xugaoxiang.com)
app Flask(__name__)
socketio Sock…
编程日记
2025/1/23 9:30:35

ffplay是做什么的
目录 ffplay是什么
一、ffplay的基本使用
二、ffplay播放控制
三、常用参数 ffplay是什么 ffplay 是FFmpeg提供的一个极为简单的音视频媒体播放器(由ffmpeg库和SDL库开发),可以用于音视频播放、可视化分析 ,提供音视频显示和播…
编程日记
2025/1/23 9:25:11

