相关文章
机器人连杆惯量参数辨识(估计)
杆的转动惯量的计算公式是Imr^2。在经典力学中,转动惯量(又称质量惯性矩,简称惯矩)通常以I 或J表示,SI 单位为 kgm。对于一个质点,I mr,其中 m 是其质量,r 是质点和转轴的垂直距离。…
编程日记
2025/1/24 1:27:18
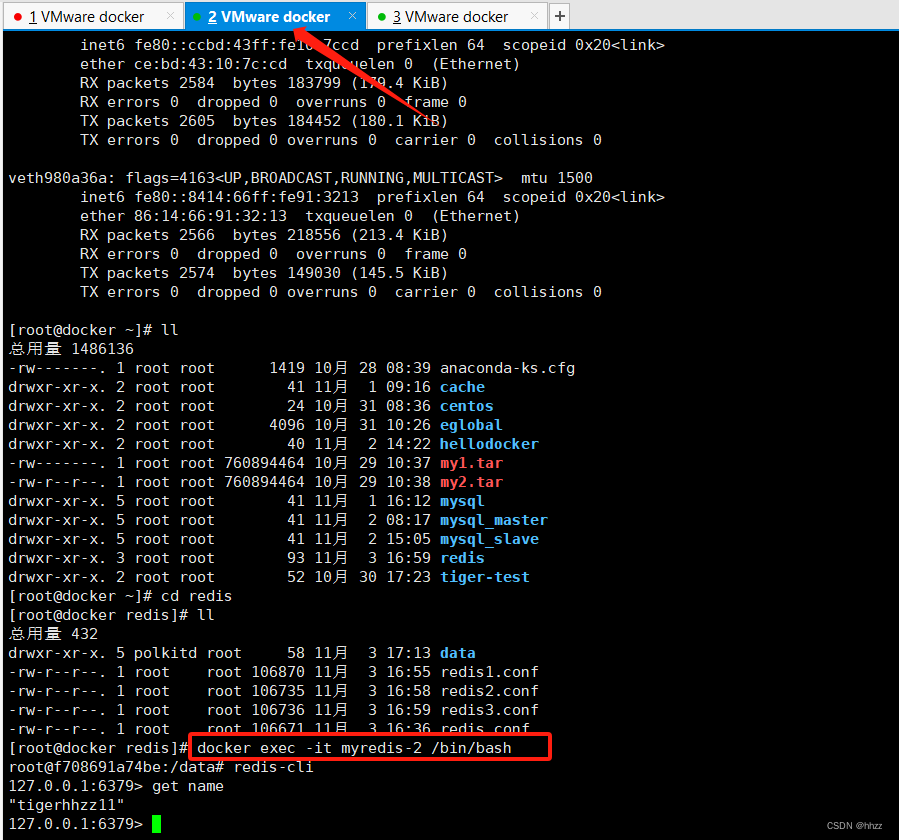
使用Docker搭建一个“一主两从”的 Redis 集群(超详细步骤)
目录 1、Redis 单机版安装1.1 拉取 Redis1.2 创建数据卷目录1.3 修改 redis.conf1.4 启动 Redis 容器1.5 进入容器连接 Redis 2、Redis 一主两从集群搭建2.1 复制三份 redis.conf2.2 启动 master2.3 启动 两个redis slave2.4 三者关系查看2.5 数据测试 1、Redis 单机版安装
1.…
编程日记
2025/1/20 6:57:53

面试题:用宏定义写出swap(x,y),即交换两数。
鼠标选中查看答案↓:
#define swap(x,y) do{(x)(x)(y);(y)(x)-(y);(x)(x)-(y);}while(0)
这个题考查宏定义的语法,尤其是多行代码的宏定义,加上do{}while(),,可以保证这些语句只执行一次。
编程日记
2025/1/17 15:44:53

GZ035 5G组网与运维赛题第9套
2023年全国职业院校技能大赛
GZ035 5G组网与运维赛项(高职组)
赛题第9套 一、竞赛须知
1.竞赛内容分布
竞赛模块1--5G公共网络规划部署与开通(35分) 子任务1:5G公共网络部署与调试(15分) 子…
编程日记
2025/1/22 21:08:28
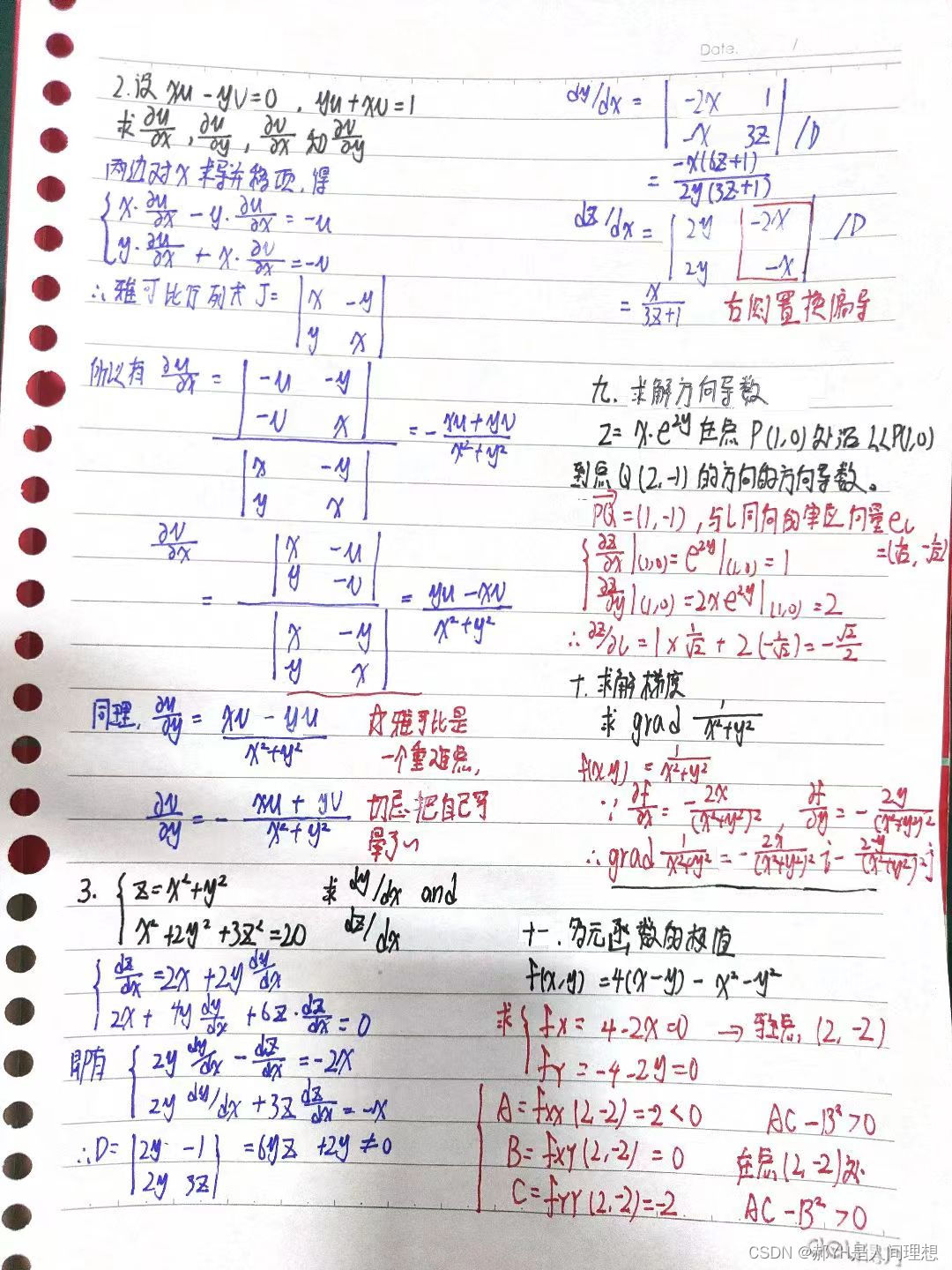
高等数学教材重难点题型总结(九)多元函数微分法及其应用
第九章习题总结完毕,最难的应该就是方程组求解隐函数中的雅可比行列式了,其他方面无论是期末还是考研都不会出太多难题。对于多元极限和连续性质要理解得更深刻一些,而方向导数、梯度等公式,应该熟练掌握~ 1. 写出多元函数的定义域…
编程日记
2025/1/16 9:26:08
Android STR研究之四
前言: 在前三篇中初步介绍了开机流程和STR流程,这里讲唤醒 Android STR研究之一-CSDN博客 Android STR研究之二-CSDN博客 Android STR研究之三-CSDN博客 唤醒
如上文所述,当唤醒的时候代码会继续往下执行 private void doHandleDeepSleep(bo…
编程日记
2025/1/19 9:29:46
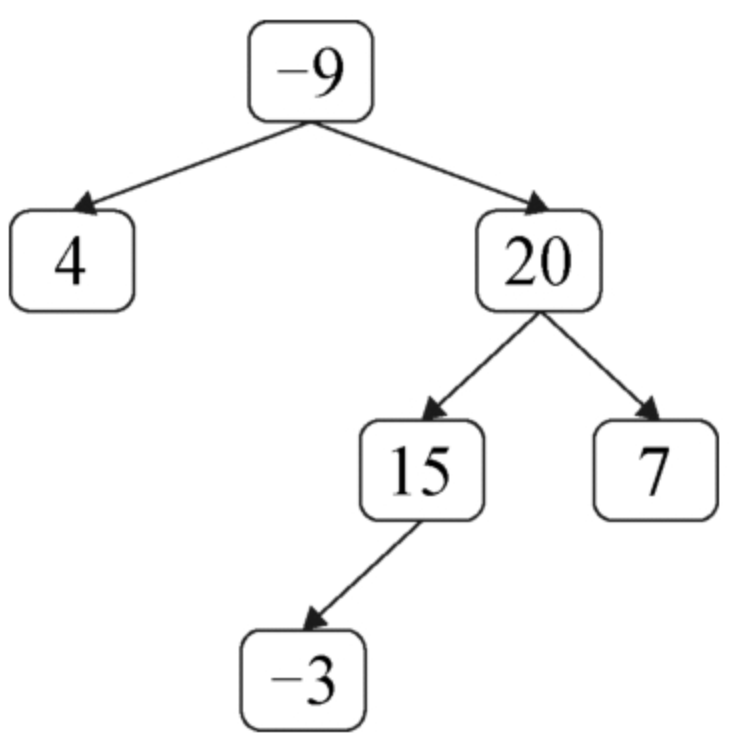
面试算法51:节点值之和最大的路径
题目
在二叉树中将路径定义为顺着节点之间的连接从任意一个节点开始到达任意一个节点所经过的所有节点。路径中至少包含一个节点,不一定经过二叉树的根节点,也不一定经过叶节点。给定非空的一棵二叉树,请求出二叉树所有路径上节点值之和的最…
编程日记
2025/1/20 6:21:55
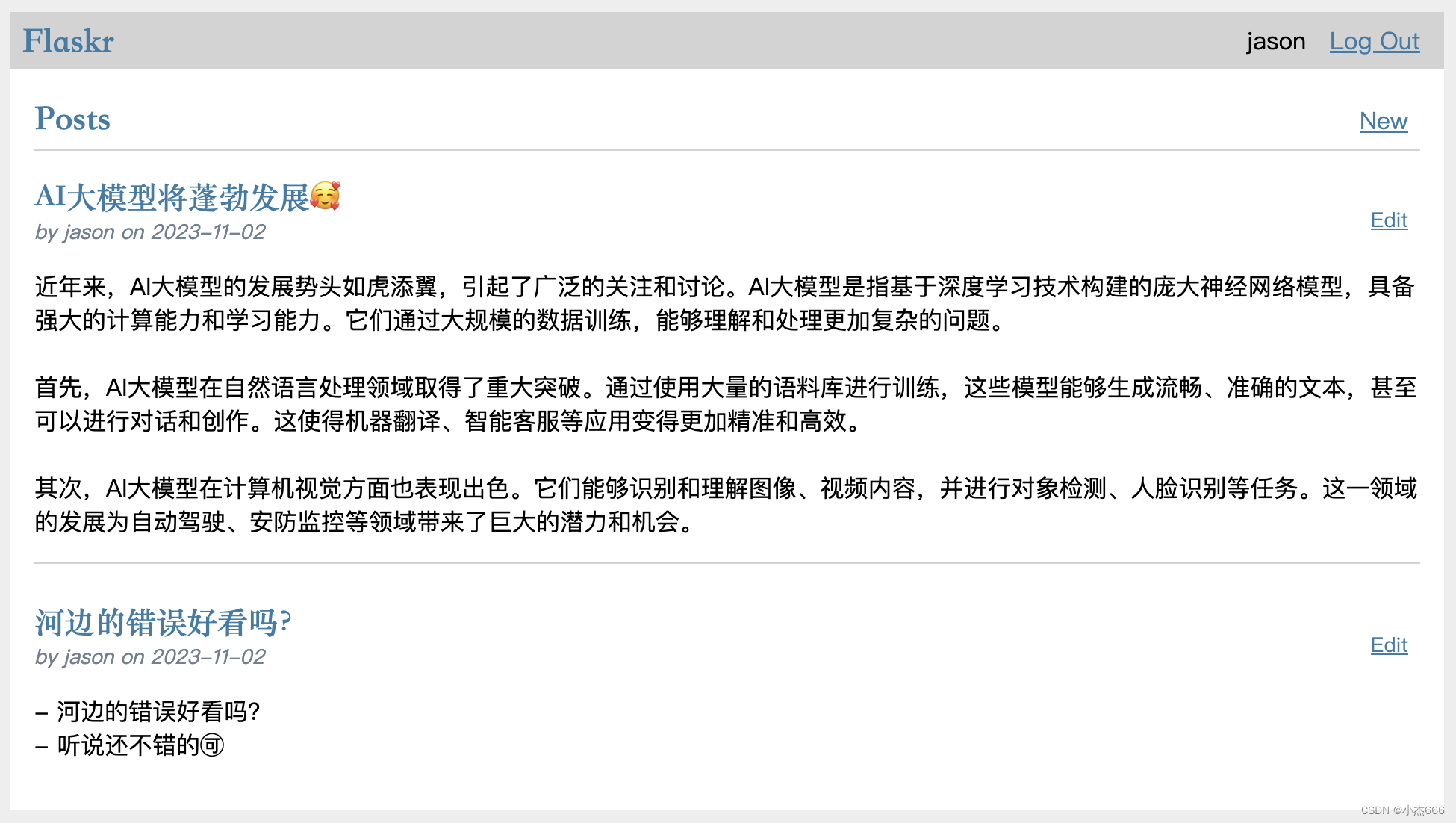
史上最详细注释,用flask写一个博客系统
文本用flask写个博客系统,源码带有详细注释,通俗易懂,拿去就能用。点 这里 查看演示。博客效果如下,博客首页: 这个博客麻雀虽小,但五脏俱全。有如下功能:
博客文章浏览用户注册用户登录/登出发…
编程日记
2025/1/17 2:31:02

