相关文章

【安全】Java幂等性校验解决重复点击(6种实现方式)
目录 一、简介1.1 什么是幂等?1.2 为什么需要幂等性?1.3 接口超时,应该如何处理?1.4 幂等性对系统的影响 二、Restful API 接口的幂等性三、实现方式3.1 数据库层面,主键/唯一索引冲突3.2 数据库层面,乐观锁…
编程日记
2025/1/21 23:46:05
C++入门学习(1)命名空间和输入输出
前言 在C语言和基本的数据结构学习之后,我们终于迎来了期待已久的C啦!C发明出来的意义就是填补一些C语言的不足,让我们更加方便的写代码,所以今天我们就来讲一下C语言不足的地方和在C中的解决办法! 一、命名空间 在学习…
编程日记
2025/1/23 0:52:23

Ansible概述以及模块
目录 一、Ansible概述: 1. Ansible是什么: 2. Ansible的作用: 3. Ansible的特性:
二、Ansible 环境安装部署: 1. 管理端安装 ansible: 2. ansible 目录结构: 3. 配置主机清单: 4. 配置密钥对验证:
三、an…
编程日记
2025/1/23 1:40:20
基于Python OpenCV的金铲铲自动进游戏、D牌...
基于Python OpenCV的金铲铲自动进游戏、D牌... 1. 自动点击进入游戏1.1 环境准备1.2 功能实现2. 自动D牌3. 游戏结束自动退1. 自动点击进入游戏
PS: 本测试只用于交流学习OpenCV的相关知识,不能用于商业用途,后果自负。 1.1 环境准备
需要金铲铲在win10的模拟器,我们这里选…
编程日记
2025/1/20 9:45:26
102. 二叉树的层序遍历
原题链接:102. 二叉树的层序遍历
以下代码为模板,需要层序遍历时都可以使用该模板进行代码更改
全代码:
class Solution {
public:vector<vector<int>> levelOrder(TreeNode* root) {//创建一个TreeNode* 队列用于存储树中的每…
编程日记
2025/1/20 15:56:27

基于ubuntu1604的ROS安装
不同版本的Ubuntu都有对应的ROS版本,不要强行安装不对应的版本,否则遇到问题会很难找到解决方法。此教程也只是基于Ubuntu1604和kinetic版本的ROS。
一、基本流程
以下命令仅记录执行顺序,不要无脑复制执行,重在理解
#基本更新…
编程日记
2025/1/19 9:18:42
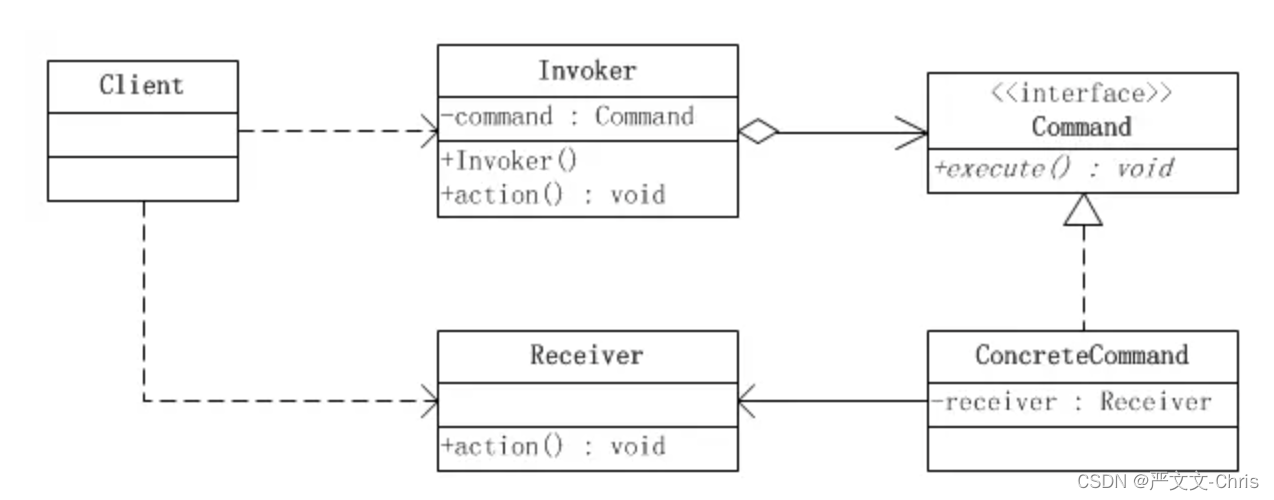
行为型模式-命令模式
这里写自定义目录标题 模式定义模式场景模式结构缺点优点总结 模式定义
将一个 请求封装为一个 对象,可以使用不同的请求进行参数化;对请求排队或者记录请求日志以及 支持可撤销的操作。别名动作模式或事务模式
模式场景
经常向某些对象发送请求&…
编程日记
2025/1/24 4:43:28

