相关文章

罗勇军 →《算法竞赛·快冲300题》每日一题:“超级骑士” ← DFS
【题目来源】http://oj.ecustacm.cn/problem.php?id1810http://oj.ecustacm.cn/viewnews.php?id1023https://www.acwing.com/problem/content/3887/【题目描述】 现在在一个无限大的平面上,给你一个超级骑士。 超级骑士有N种走法,请问这个超级骑士能否…
编程日记
2025/1/21 1:33:48

基于jeecg-boot的flowable流程加签功能实现
更多nbcio-boot功能请看演示系统
gitee源代码地址
后端代码: https://gitee.com/nbacheng/nbcio-boot
前端代码:https://gitee.com/nbacheng/nbcio-vue.git
在线演示(包括H5) : http://122.227.135.243:9888 今天我…
编程日记
2025/1/20 9:30:54
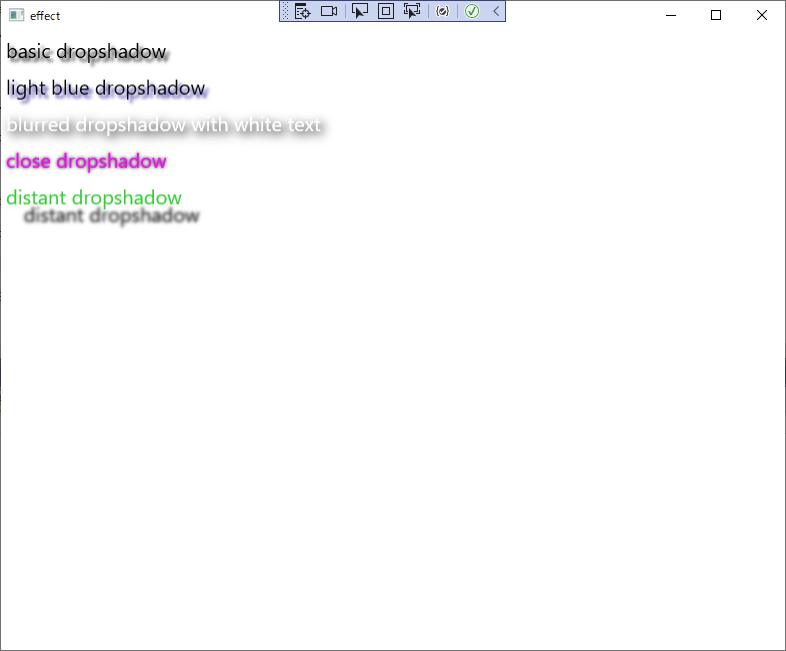
WPF中的效果Effect
WPF中的效果Effect
前言
WPF提供了可应用于任何元素的可视化效果。效果的目标是提供一种简便的声明式方法,从而改进文本、图像、按钮以及其他控件的外观。不是编写自己的绘图代码,而是使用某个继承自Effect的类,以立即获得诸如模糊、光辉以…
编程日记
2025/1/18 2:37:10
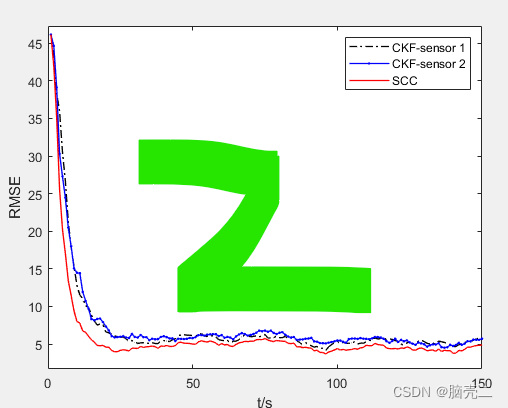
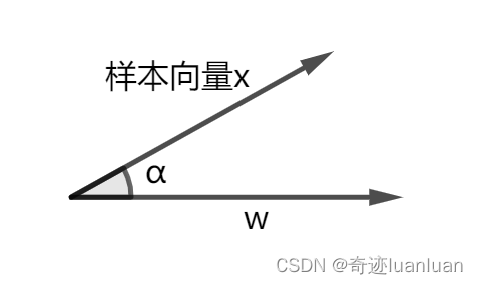
多传感器分布式融合算法——加权最小二乘WLS融合/简单凸组合SCC融合
加权最小二乘WLS融合/简单凸组合SCC融合——多传感器分布式融合算法
原创不易,路过的各位大佬请点个赞
主要讲解算法: 加权最小二乘融合WLS 简单凸组合融合SCC
应用于: 多传感器网络协同目标跟踪/定位/导航
联系WX: ZB823618313 目…
编程日记
2025/1/20 4:36:58
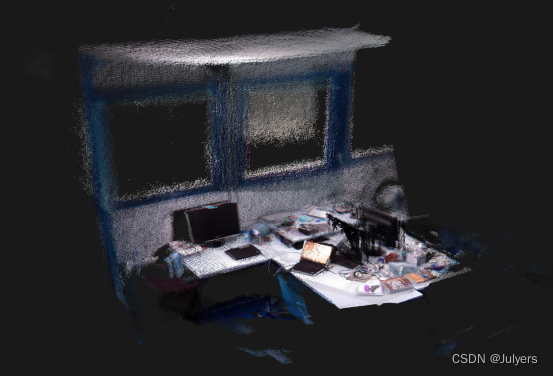
记录:ubuntu20.04+ORB_SLAM2_with_pointcloud_map+ROS noetic
由于相机实时在线运行需要ROS,但Ubuntu22.04只支持ROS2,于是重装Ubuntu20.04。上一篇文章跑通的是官方版本的ORB_SLAM2,不支持点云显示。高翔修改版本支持RGB-D相机的点云显示功能。 高翔修改版本ORB_SLAM2:https://github.com/ga…
编程日记
2025/1/20 23:31:22

智能算法挑战赛决赛题目——初中组
题目 1. 判断是否存在重复的子序列
从 m 个字符中选取字符,生成 n 个符号的序列,使得其中没有 2 个相邻的子序列相同。如从 1,2,3,生成长度为 5 的序列,序列“12321”是合格的,而“12323”和“…
编程日记
2025/1/19 14:22:47

