相关文章

CUDA | 核函数编写的注意事项
核函数是用 __global__ 修饰的;核函数的返回值是 void;
下面两种形式都是可以的:
__global__ void kernel_function(argument arg){printf("Hello World from the GPU!\n");
}void __global__ kernel_function(argument arg){pri…
编程日记
2025/2/26 14:11:34
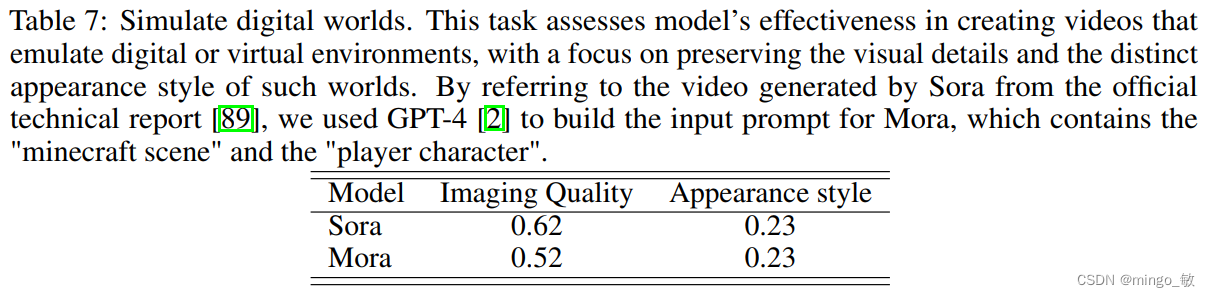
Mora: Enabling Generalist Video Generation via A Multi-Agent Framework
Mora: Enabling Generalist Video Generation via A Multi-Agent Framework PDF: https://arxiv.org/html/2403.13248v1
1 概述
为弥补Sora不开源的缺陷,本文提出多代理框架Mora,整合先进视觉AI代理,复制Sora的全能视频生成能力。Mora能利用…
编程日记
2025/2/23 0:48:33

Kubernetes自动化配置部署
在新建工程中,使用k8s的devops服务,自动化部署项目
1、在搭建好k8s的集群中,确认已开启devops服务;
2、新建Maven项目之后,创建dockerfile、deploy和Jenkins文件
例如:
Dockerfile
FROM bairong.k8s.m…
编程日记
2025/2/24 9:05:59

Java项目:71 ssm基于ssm+vue的外卖点餐系统+vue
作者主页:源码空间codegym 简介:Java领域优质创作者、Java项目、学习资料、技术互助 文中获取源码 项目介绍
系统功能 系统分为前台订餐和后台管理:
1.前台订餐 用户注册、用户登录、我的购物车、我的订单、商品列表
2.后台管理 商品管理&…
编程日记
2025/2/12 3:44:36

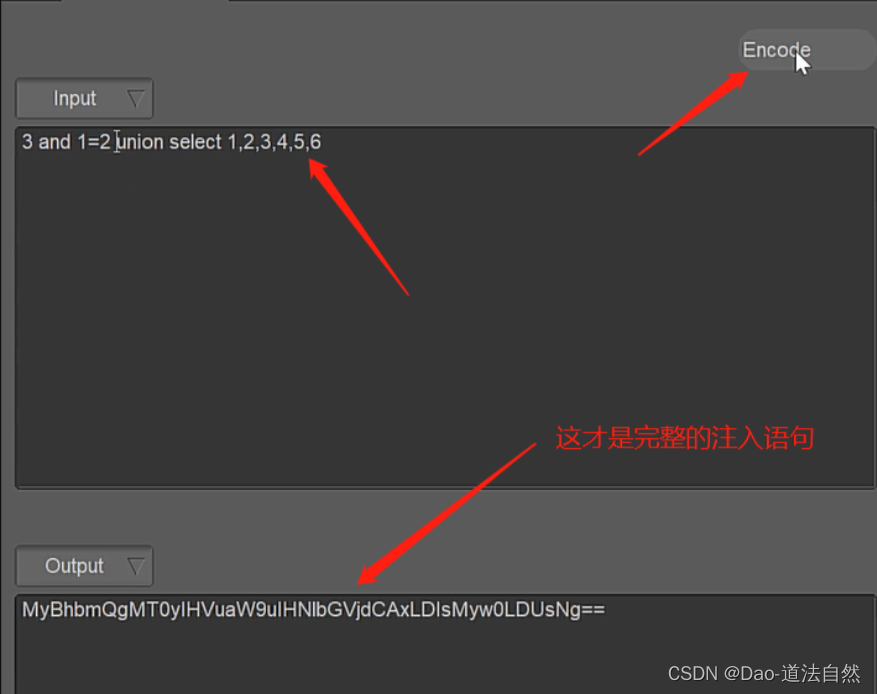
Day43:WEB攻防-PHP应用SQL注入符号拼接请求方法HTTP头JSON编码类
目录
PHP-MYSQL-数据请求类型
PHP-MYSQL-数据请求方法
PHP-MYSQL-数据请求格式 知识点: 1、PHP-MYSQL-SQL注入-数据请求类型 2、PHP-MYSQL-SQL注入-数据请求方法 3、PHP-MYSQL-SQL注入-数据请求格式 PHP-MYSQL-数据请求类型 SQL语句由于在黑盒中是无法预知写法的…
编程日记
2025/2/23 21:43:03
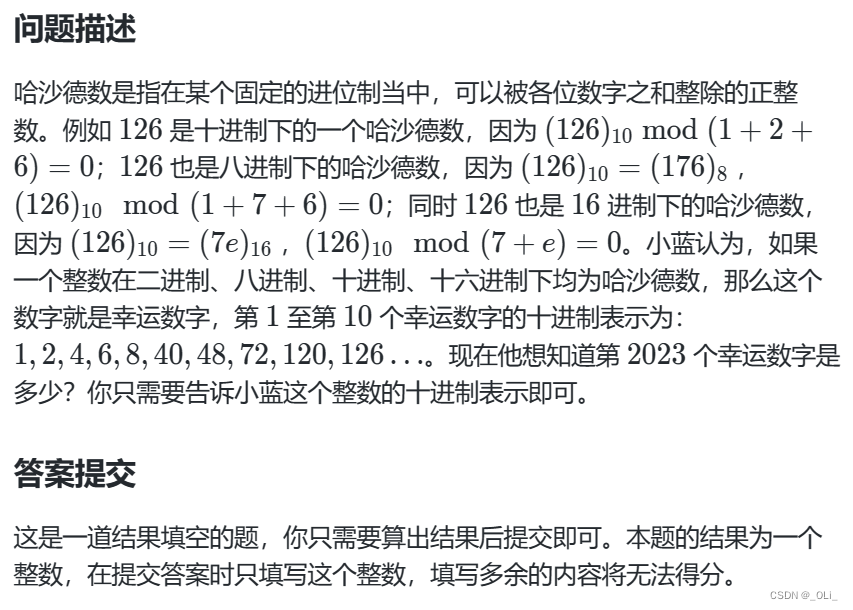
第十四届蓝桥杯JavaB组省赛真题 - 幸运数字
进制转换可以参考如下的十进制,基本一样的,只是把10变成了其他数字,
sum就是各个数位之和
public static int myUtil(int n) {int sum 0;while(n > 0) {sum n % 10;n / 10;}return sum;}
注意:
如果写在同一个类里面&…
编程日记
2025/2/25 12:57:56
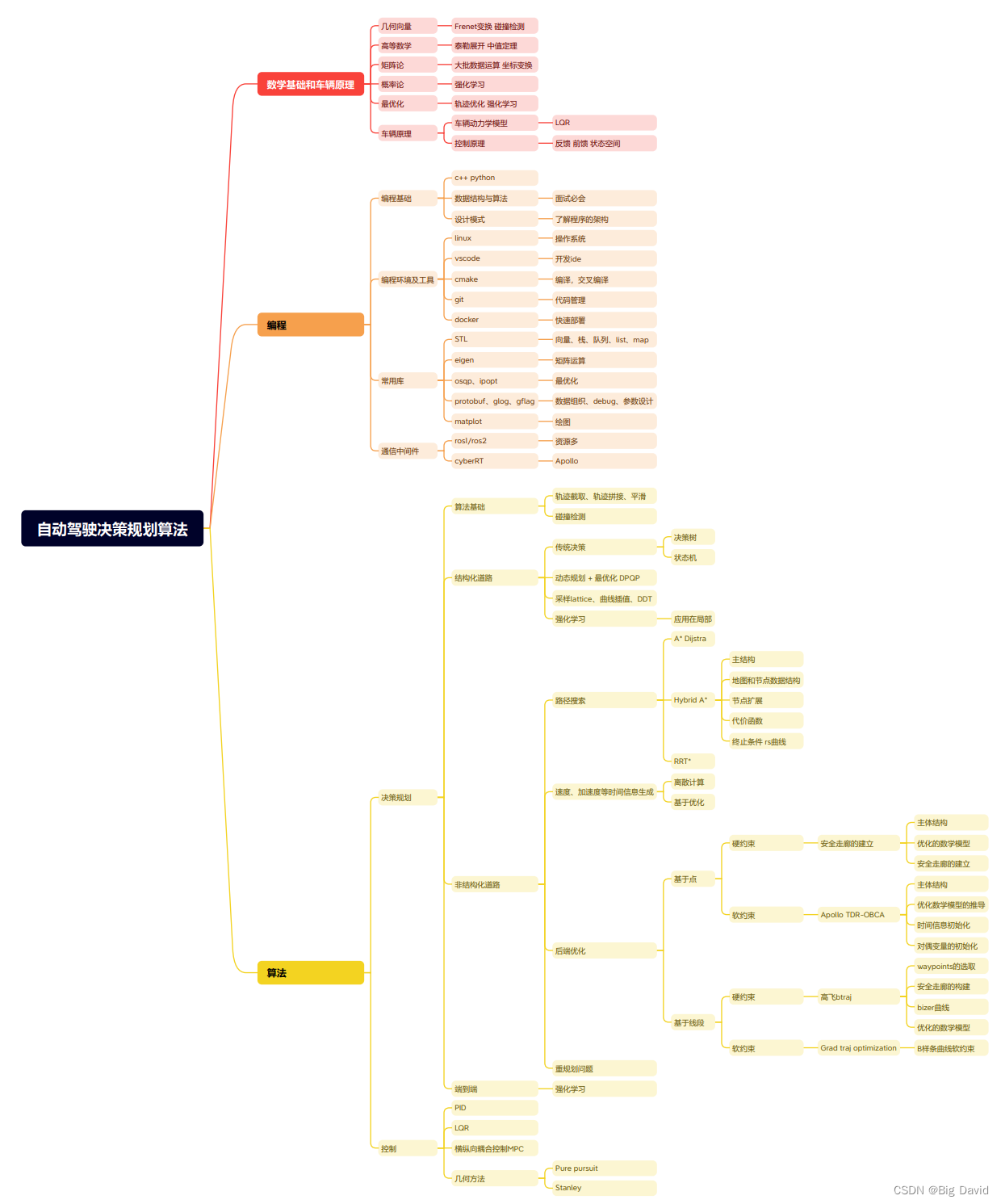
自动驾驶决策 - 规划 - 控制 (持续更新!!!)
总目录 Frenet与Cartesian坐标系
Apollo基础 - Frenet坐标系
车辆模型
车辆运动学和动力学模型
控制算法
PID控制器轨迹跟随实现 Pure Pursuit控制器路径跟随 路径跟踪算法Stanley 实现 c 无人驾驶LQR控制算法 c 实现 MPC自动驾驶横向控制算法实现 c 双环PID控制详细讲解 …
编程日记
2025/2/19 13:11:51

