相关文章

数据结构 - 顺序表实现通讯录
test.c文件
#define _CRT_SECURE_NO_WARNINGS 1#include "Contact.h"
int main()
{Con myContacts;ConInit(&myContacts);int choice;int index;char targetName[100];PerInfo contact; // 创建一个新的联系人信息实例while (1) {printf("\n--- 通讯录管理…
编程日记
2025/1/23 10:25:54
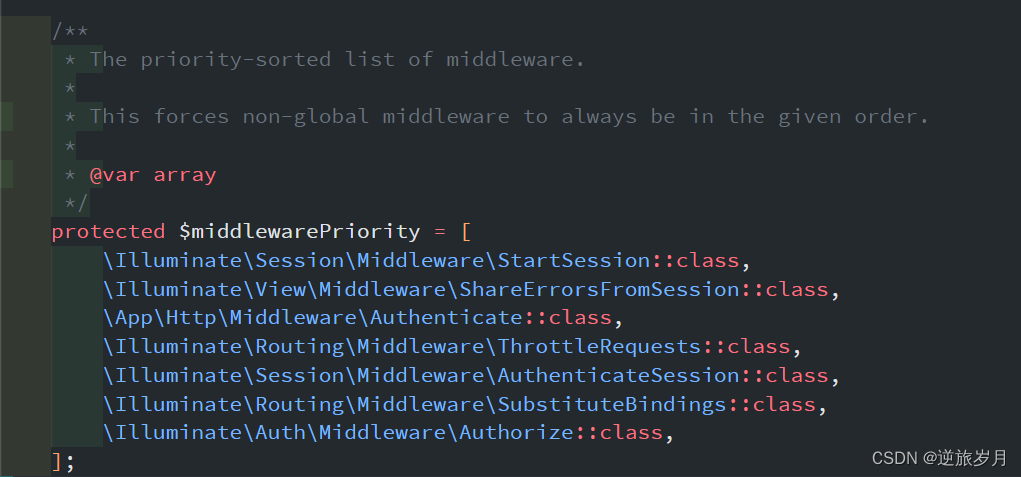
Laravel 6 - 第十一章 中间件
文章目录
Laravel 6 - 第一章 简介 Laravel 6 - 第二章 项目搭建 Laravel 6 - 第三章 文件夹结构 Laravel 6 - 第四章 生命周期 Laravel 6 - 第五章 控制反转和依赖注入 Laravel 6 - 第六章 服务容器 Laravel 6 - 第七章 服务提供者 Laravel 6 - 第八章 门面 Laravel 6 - …
编程日记
2025/1/23 10:26:22
Python第四次作业
主程序
import MyTriangles1 float(input("请输入边长1:"))
s2 float(input("请输入边长2:"))
s3 float(input("请输入边长3:"))r MyTriangle.isvalid(s1, s2, s3)
if r:a MyTriangle.area(s1, s2, s3)print("面积为:&quo…
编程日记
2025/1/20 9:52:37
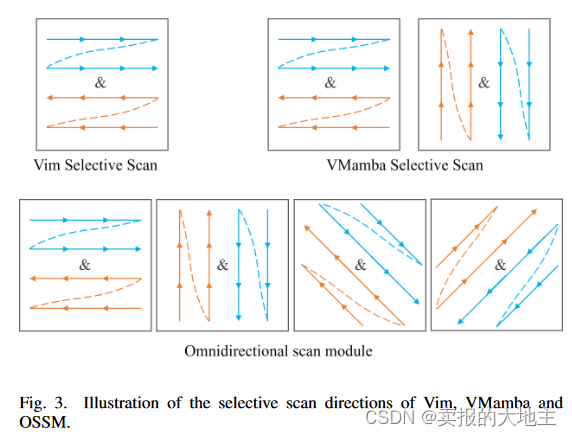
【论文笔记】RS-Mamba for Large Remote Sensing Image Dense Prediction(附Code)
论文作者提出了RS-Mamba(RSM)用于高分辨率遥感图像遥感的密集预测任务。RSM设计用于模拟具有线性复杂性的遥感图像的全局特征,使其能够有效地处理大型VHR图像。它采用全向选择性扫描模块,从多个方向对图像进行全局建模,从多个方向捕捉大的空间…
编程日记
2025/1/21 13:39:15

多目标应用:基于非支配排序粒子群优化算法NSPSO求解无人机三维路径规划(MATLAB代码)
一、无人机多目标优化模型
无人机三维路径规划是无人机在执行任务过程中的非常关键的环节,无人机三维路径规划的主要目的是在满足任务需求和自主飞行约束的基础上,计算出发点和目标点之间的最佳航路。
1.1路径成本
无人机三维路径规划的首要目标是寻找…
编程日记
2025/1/23 6:16:27

(5)步态识别论文研读——GaitDAN:基于对抗域适应的跨视角步态识别
GaitDAN: Cross-view Gait Recognition via Adversarial Domain Adaptation | IEEE Journals & Magazine | IEEE Xplore
GaitDAN: Cross-view Gait Recognition via Adversarial Domain Adaptation
基于对抗与适应
摘要:视角变化导致步态外观存在显着差异。因…
编程日记
2025/1/22 4:04:14
通用型自定义拼接 SQL 脚本,摆脱重复工作量
通用型自定义拼接sql脚本,摆脱重复工作量
在开发 Restful 接口时,我们经常需要根据前端传递的参数动态拼接 SQL 查询语句,以满足不同的查询需求。本文将介绍一个通用的自定义拼接 SQL 脚本的方法,帮助开发人员减少重复工作量。
首先&#x…
编程日记
2025/1/21 15:14:06
NL2SQL技术方案系列(3):大模型工具调用实战NL2API技术方案以及行业案例讲解1
NL2SQL技术方案系列(3):大模型工具调用实战NL2API技术方案以及行业案例讲解1
NL2SQL基础系列(1):业界顶尖排行榜、权威测评数据集及LLM大模型(Spider vs BIRD)全面对比优劣分析[Text2SQL、Text2DSL]
NL2SQL基础系列(2):主流大模型与微调方法精选集,Text2SQL经典算法技术…
编程日记
2025/1/23 4:56:46

