相关文章

网络协议栈--传输层--UDP/TCP协议
目录 本节重点一、再谈端口号1.1 再谈端口号1.2 端口号范围划分1.3 认识知名端口号(Well-Know Port Number)1.4 回答两个问题1.5 netstat1.6 pidof 二、UDP协议2.1 UDP协议段格式2.2 UDP的特点2.3 面向数据报2.4 UDP的缓冲区2.5 UDP使用注意事项2.6 基于UDP的应用层协议2.7 UDP…
编程日记
2025/1/21 6:56:15

在word中显示Euclid Math One公式的问题及解决(latex公式,无需插件)
问题:想要在word中显示形如latex中的花体字母 网上大多解决办法是安装Euclid Math One。安装后发现单独的符号插入可行,但是公式中选择该字体时依然显示默认字体。 解决办法:插入公式后,勾选左上角的latex 在公式块中键入latex代码…
编程日记
2025/1/22 19:44:13

【LeetCode热题100】124.二叉树的最大路径和(二叉树)
一.题目要求
二叉树中的 路径 被定义为一条节点序列,序列中每对相邻节点之间都存在一条边。同一个节点在一条路径序列中 至多出现一次 。该路径 至少包含一个 节点,且不一定经过根节点。 路径和 是路径中各节点值的总和。 给你一个二叉树的根节点 root …
编程日记
2025/1/19 3:32:32
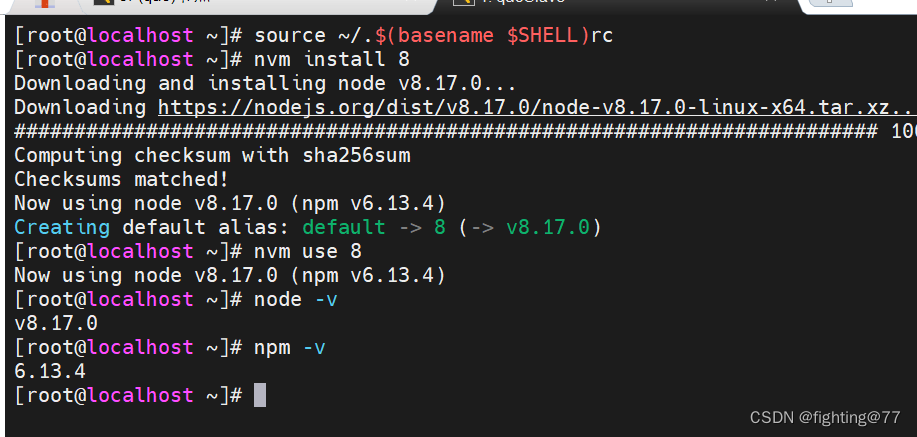
通过Caliper进行压力测试程序,且汇总压力测试问题解决
环境要求
第一步. 配置基本环境 部署Caliper的计算机需要有外网权限;操作系统版本需要满足以下要求:Ubuntu >= 16.04、CentOS >= 7或MacOS >= 10.14;部署Caliper的计算机需要安装有以下软件:python 2.7、make、g++(gcc-c++)、gcc及git。第二步. 安装NodeJS
# …
编程日记
2025/1/23 2:27:01

【多模态融合】SuperFusion 激光雷达与相机多层次融合 远距离高清地图预测 ICRA 2024
前言
本文介绍激光雷达与相机进行多层次融合,包括数据级融合、特征级融合和BEV级融合。
融合后的BEV特征可以支持不同的任务头,包括语义分割、实例编码和方向预测,最后进行后处理生成高清地图预测,它是来自ICRA 2024的。
会讲解…
编程日记
2025/1/23 0:46:35
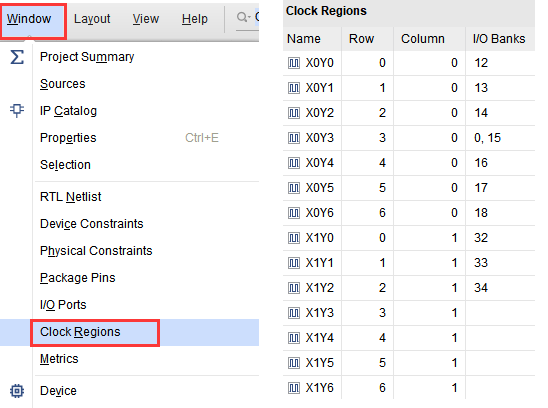
FPGA结构与片上资源
文章目录 0.总览1.可配置逻辑块CLB1.1 6输入查找表(LUT6)1.2 选择器(MUX)1.3 进位链(Carry Chain)1.4 触发器(Flip-Flop) 2.可编程I/O单元2.1 I/O物理级2.2 I/O逻辑级 3.布线资源4.其…
编程日记
2025/1/19 23:13:46

使用conda管理python环境
为什么需要管理环境?
每个python程序依赖的库版本可能不同,因此我们需要隔离不同的环境。
创建环境:
conda create --name myenv python3.8这将创建一个名为myenv的新环境,并在其中安装Python 3.8版本。
列出所有环境…
编程日记
2025/1/22 3:18:01

