相关文章

算法课程笔记——STL键值对map
map当下标无限的数组 重点是对应关系,一般不修改compare 类比set 没有lowerbound,因为遍历是无序的 ; map不能用sort函数排序 但可用vector转化为map使用 std::set<std::pair<TKEY, mutable TVAL> > ≈ std::map<TKEY, TVAL>
编程日记
2025/2/24 9:00:29
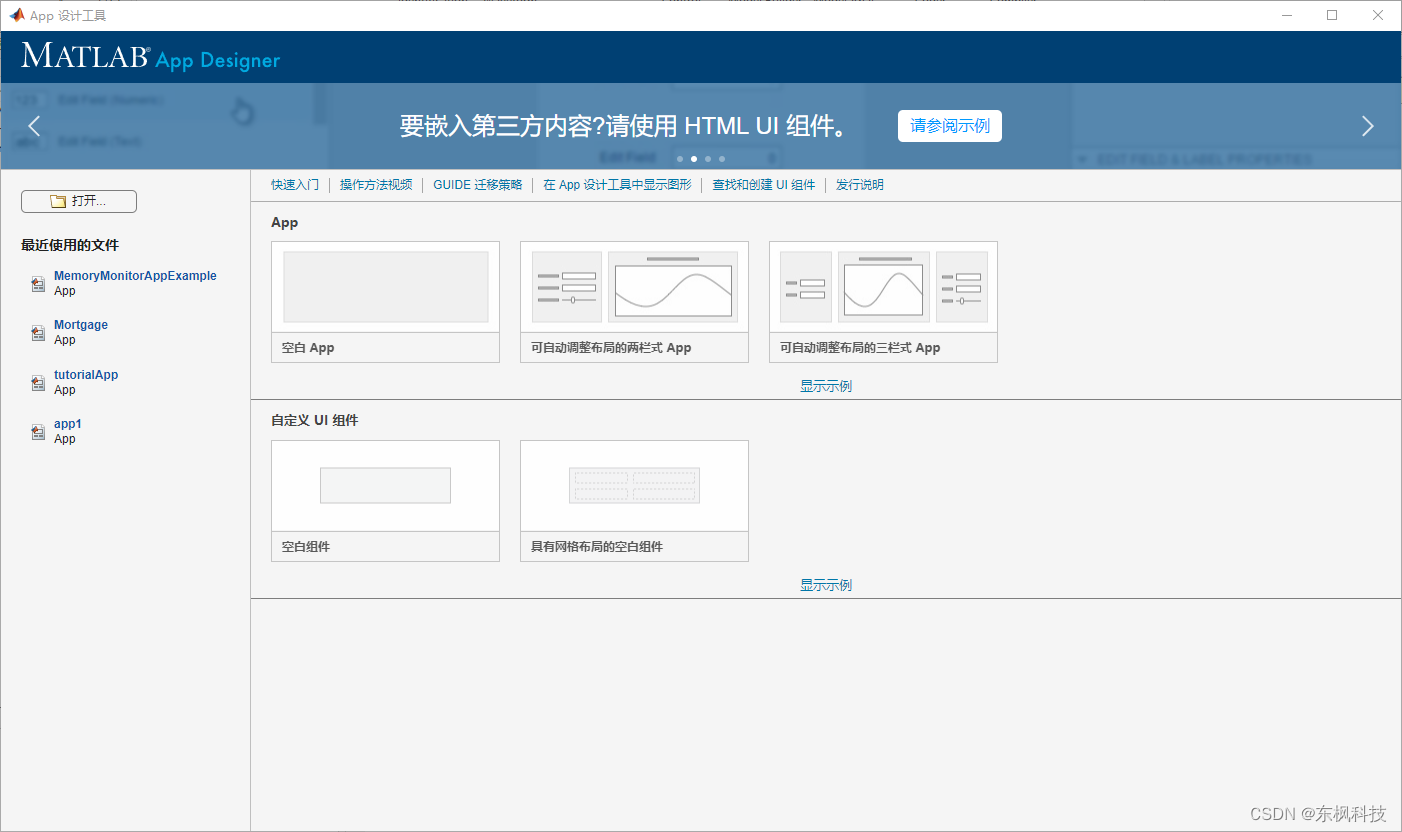
【MATLAB】App 设计 (入门)
设计APP 主界面 函数方法
定时器
classdef MemoryMonitorAppExample < matlab.apps.AppBase% Properties that correspond to app componentsproperties (Access public)UIFigure matlab.ui.FigureStopButton matlab.ui.control.ButtonStartButton matlab.ui.cont…
编程日记
2025/2/20 11:15:33

企业网站制作如何被百度收录
1、网站在百度中的整体评分
说俗点就是网站的权重,在优化过程中我们会见到很多网站出现秒收的情况,发布的文章几分钟就可以收录,这个通过SITE语法都可以去查询,那么这跟自己的网站权重以及内容更新习惯是有非常重要的关联。
我们…
编程日记
2025/2/18 1:04:31

Nginx实现反向代理、负载均衡、动静分离
1. 什么是Nginx的反向代理?
Nginx的反向代理是指Nginx作为服务器的前端,接收客户端的请求,然后将请求转发给后端的真实服务器,并将真实服务器的响应返回给客户端。这种代理方式使得客户端并不知道真实服务器的存在,它…
编程日记
2025/2/20 12:10:35

轮腿机器人-五连杆正运动学解算
轮腿机器人-五连杆与VMC 1.五连杆正运动学分析2.参考文献 1.五连杆正运动学分析 如图所示为五连杆结构图,其中A,E为机器人腿部控制的两个电机,θ1,θ4可以通过电机的编码器测得。五连杆控制任务主要关注机构末端C点位置,其位置用直…
编程日记
2025/2/12 23:17:50
深入理解数据结构第五弹——排序(2)——快速排序
排序(1):深入了解数据结构第四弹——排序(1)——插入排序和希尔排序-CSDN博客
前言: 在前面我们已经讲过了几种排序方式,他们的效率有快有慢,今天我们来学习一种非常高效的排序方式…
编程日记
2025/2/16 17:37:29
24届数字IC验证——SV+UVM基础知识汇总(九)
文章目录 前言57、module和program区别58、仿真调度区域59、fork-join、fork-join_none和fork-join_any的区别(经常问)60、D触发器输入高阻,输出是什么61、recovery time和removal time62、设置仿真退出时间62、$ time和$ realtime区别63、选择验证的原因(常问)64、验证工…
编程日记
2025/2/24 7:12:10
java日志log4j使用
1、导入jar包
log4j-1.2.17.jar log4j-api-2.0-rc1.jar log4j-core-2.0-rc1.jar https://download.csdn.net/download/weixin_44201223/89148839 所需jar包下载地址
2、创建 log4j.properties
src 下创建 log4j.properties (路径和名称都不允许改变),放置 src 下…
编程日记
2025/2/17 2:44:48

