相关文章

【AUTOSAR 基础软件】软件组件的建立与使用(“代理”SWC)
基础软件往往需要建立一些“代理”SWC来完成一些驱动的抽象工作(Complex_Device_Driver_Sw或者Ecu_Abstraction_Sw等),或建立Application Sw Component来补齐基础软件需要提供的功能实现。当面对具体的项目时,基础软件开发人员还可…
编程日记
2025/3/16 16:29:16
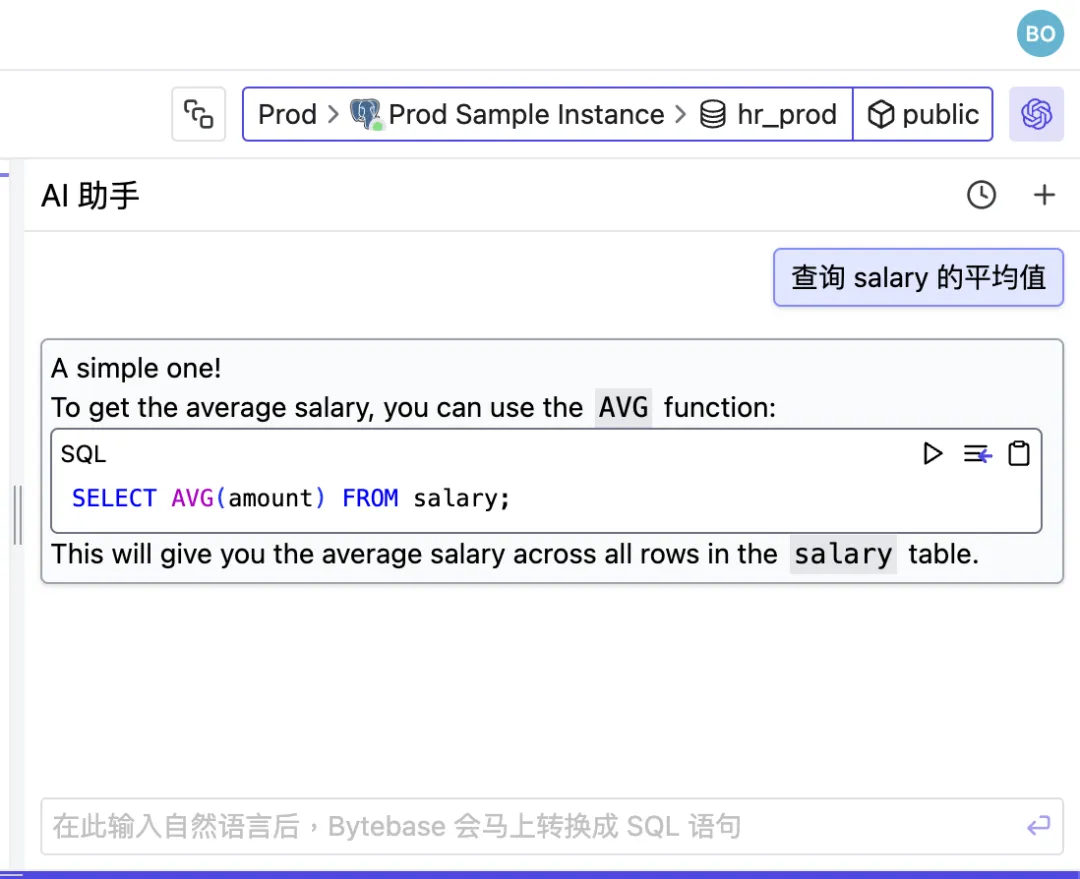
自然语言转 SQL:通过 One API 将 llama3 模型部署在 Bytebase SQL 编辑器
使用 Open AI 兼容的 API,可以在 Bytebase SQL 编辑器中使用自然语言查询数据库。
出于数据安全的考虑,私有部署大语言模型是一个较好的选择 – 本文选择功能强大的开源模型 llama3。
由于 OpenAI 默认阻止出站流量,为了简化网络配置&#…
编程日记
2025/3/15 3:00:04

25/1/12 算法笔记 剖析Yolov8底层逻辑
YOLOv8 是一种基于深度学习的目标检测和图像分割模型,属于 YOLO(You Only Look Once)系列的最新版本。YOLO 系列模型以其高效的实时目标检测能力而闻名,YOLOv8 在此基础上进行了一些优化和改进。
Yolov8的主要特点:
…
编程日记
2025/3/14 6:32:23

Webshell工具内网穿透
webshell权限(192.168.52.135)
冰蝎(Behinder)
socks隧道搭建
现在我们是拿到了webshell权限(192.168.52.135)开启本地端口监听
配置proxy代理 访问内网主机(开启了weblogic服务…
编程日记
2025/3/14 9:29:12

day39 面向对象特征之封装
仿照string类,实现myString
#include <iostream>
#include<string.h>
#include<cstring>using namespace std;class myString
{
private:char *str; //记录c风格的字符串int size; //记录字符串的实际长度
public://无参构造myString():size(0…
编程日记
2025/3/14 3:52:36

ROS Action接口
实现自主导航是使用Action接口的主要目的
在实际使用navigation导航系统的时候,机器人需要自主进行导航。不能每次都手动设置导航的目标点。所以需要编写程序代码来实现导航控制。这就需要使用到navigation的导航接口。Navigation的这个导航接口有好几个。Rose官方…
编程日记
2025/3/14 23:39:37

检验统计量与p值笔记
一、背景 以雨量数据为例,当获得一个站点一年的日雨量数据后,我们需要估计该站点的雨量的概率分布情况,因此我们利用有参估计的方式如极大似然法估计得到了假定该随机变量服从某一分布的参数,从而得到该站点的概率密度函数&#x…
编程日记
2025/3/13 9:22:05
winform监听全局鼠标事件
如果您希望监听全局鼠标事件,即使在其他应用程序(如浏览器或其他软件)中按下鼠标按钮也能捕捉到这些事件,您需要使用低级别的Windows API钩子。WinForms本身并不直接支持全局事件监听,但通过调用Windows API࿰…
编程日记
2025/3/15 2:32:19

