相关文章

Docker核心原理与实操
第一章、Docker基本概念
1、概念:Docker是一种容器技术,可以解决软件跨环境迁移问题。 2、实现原理:是一个分层复用的文件系统;每一层都是一个独立的软件; …
编程日记
2025/1/21 14:04:01
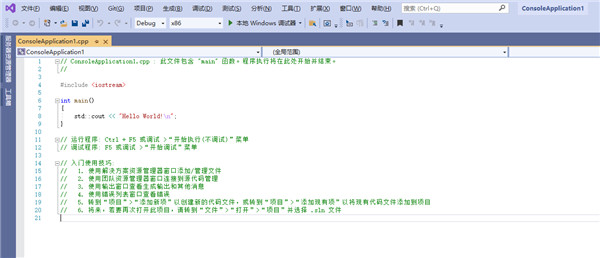
Visual Studio 2023年下载、安装教程、亲测有效
visual studio 2022(vs 2022)是由微软官方出品的最新版本的开发工具包系列产品。它是一个完整的开发工具集,可完美支持C#、C、Python、Visual Basic、Node.js、HTML、JavaScript等主流的编程语言,帮助程序员轻松地完成调试、探查和…
编程日记
2025/1/23 4:13:12

Xilinx FPGA管脚约束语法规则(UCF和XDC文件)
文章目录 1. ISE环境(UCF文件)2. Vivado环境(XDC文件) 本文介绍ISE和Vivado管脚约束的语句使用,仅仅是管脚和电平状态指定,不包括时钟约束等其他语法。
ISE使用UCF文件格式,Vivado使用XDC文件&…
编程日记
2025/1/21 9:25:33
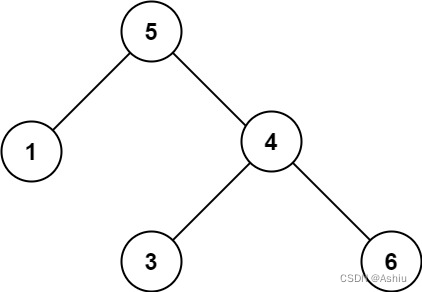
98. 验证二叉搜索树
98. 验证二叉搜索树 题目-中等难度示例1. 中序遍历2. dfs 题目-中等难度
给你一个二叉树的根节点 root ,判断其是否是一个有效的二叉搜索树。
有效 二叉搜索树定义如下:
节点的左子树只包含 小于 当前节点的数。 节点的右子树只包含 大于 当前节点的数…
编程日记
2025/1/16 10:09:19
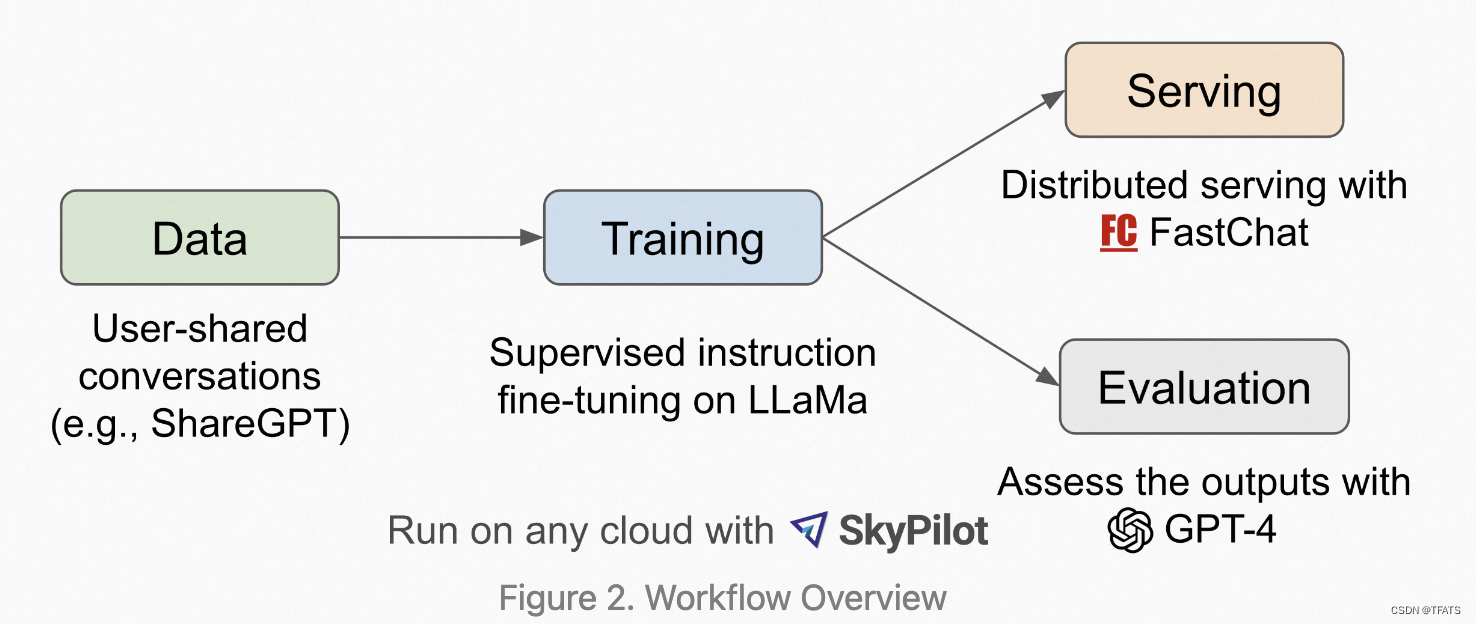
AIGC入门 - LLM 信息概览
本文将介绍以下 LLM
OPTLLaMaAlpacaVicunaMosschatGLMBaichuanOpenbuddy
一、OPT
1、背景
OPT全称Open Pre-trained Transformer Language Models,即“开放的预训练Transformer语言模型”,是 Meta AI 团队在2022年5月发布了开源大模型OPT-175B&#…
编程日记
2025/1/20 21:34:27

基于ROS环境的相机标定教程
一、参考资料
ROS学习——利用电脑相机标定
二、安装usb_cam驱动包
usb_cam - ROS Wiki GitHub - ros-drivers/usb_cam: A ROS Driver for V4L USB Cameras
usb_cam包用于读取图像。
1. 源码安装usb_cam
usb_cam用于实时SLAM,配合ROS平台使用。
1.1 下载usb_…
编程日记
2025/1/22 1:57:16

【AI语言大模型】文心一言功能使用介绍
一、前言
文心一言是一个知识增强的大语言模型,基于飞桨深度学习平台和文心知识增强大模型,持续从海量数据和大规模知识中融合学习具备知识增强、检索增强和对话增强的技术特色。 最近收到百度旗下产品【文心一言】的产品,抱着试一试的心态体验了一下,整体感觉:还行! 二…
编程日记
2025/1/16 2:52:42
第30节——react hook 模仿生命周期
1、模仿componentDidMount
import React, { useState, useEffect, useContext } from react;export default function hook() {useEffect(() > {/*** 当它是一个空数组时,回调只会被触发一次,类似于 componentDidMount*/console.log("component…
编程日记
2025/1/19 20:05:52

