相关文章

Android BottomSheetDialog最大展开高度问题
修改界面的时候遇到了这个问题,这个问题比较简单,网上解决方案也很多,这是 peekHeight 半展开高度,毕竟只是 dialog,全铺满就我们不必考虑 dialog 了 方法是在DialogFragment初始化dialog时处理
companion object {/*** 设置弹窗高度 默认展开无折叠情况 */ const val …
编程日记
2025/1/23 13:37:33
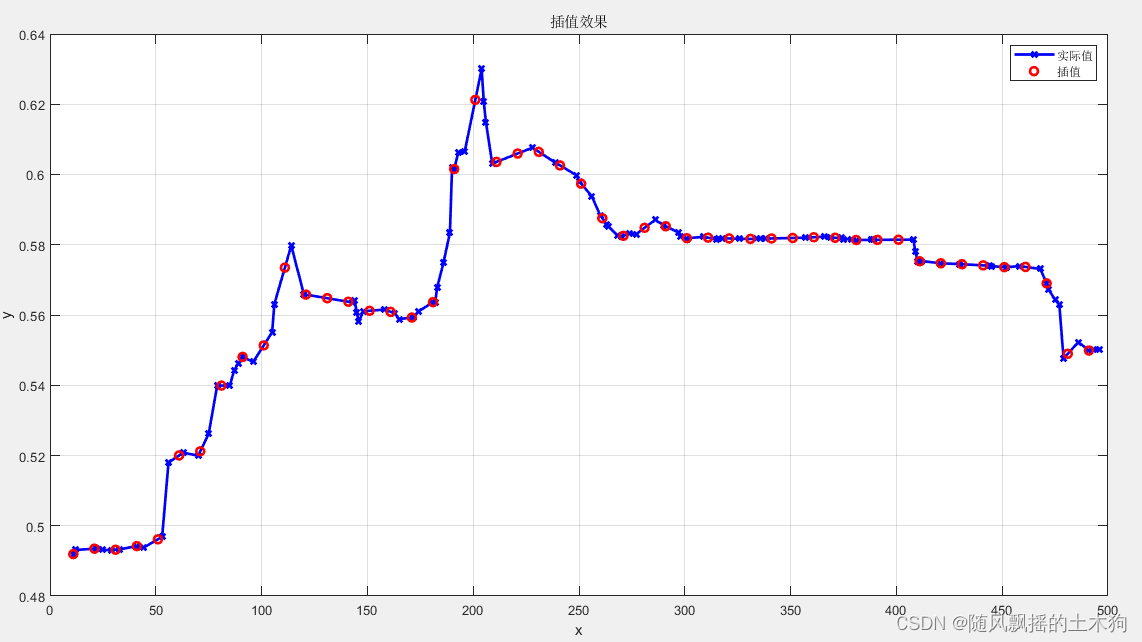
【MATLAB第75期】#源码分享 | 基于MATLAB的不规则数据插值实现时间序列数据扩充
【MATLAB第75期】#源码分享 | 基于MATLAB的不规则数据插值实现时间序列数据扩充
如时间数据以单位1为间隔排序, 可插间隔为0.5的数据 。
一、实现效果
1.规则间隔数据 2.非规则间隔数据 二、主程序代码
1.插值测试效果
%% 清空环境变量
warning off …
编程日记
2025/1/21 14:06:43

Docker核心原理与实操
第一章、Docker基本概念
1、概念:Docker是一种容器技术,可以解决软件跨环境迁移问题。 2、实现原理:是一个分层复用的文件系统;每一层都是一个独立的软件; …
编程日记
2025/1/21 14:04:01
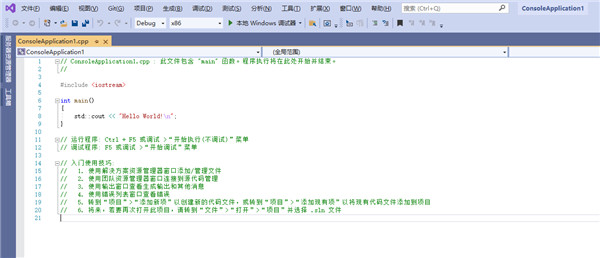
Visual Studio 2023年下载、安装教程、亲测有效
visual studio 2022(vs 2022)是由微软官方出品的最新版本的开发工具包系列产品。它是一个完整的开发工具集,可完美支持C#、C、Python、Visual Basic、Node.js、HTML、JavaScript等主流的编程语言,帮助程序员轻松地完成调试、探查和…
编程日记
2025/1/23 4:13:12
Xilinx FPGA管脚约束语法规则(UCF和XDC文件)
文章目录 1. ISE环境(UCF文件)2. Vivado环境(XDC文件) 本文介绍ISE和Vivado管脚约束的语句使用,仅仅是管脚和电平状态指定,不包括时钟约束等其他语法。
ISE使用UCF文件格式,Vivado使用XDC文件&…
编程日记
2025/1/21 9:25:33
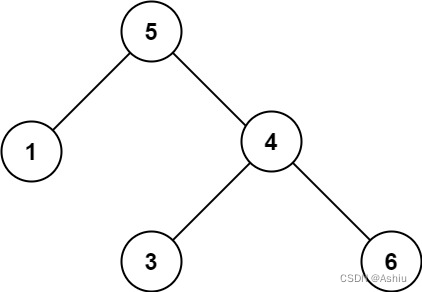
98. 验证二叉搜索树
98. 验证二叉搜索树 题目-中等难度示例1. 中序遍历2. dfs 题目-中等难度
给你一个二叉树的根节点 root ,判断其是否是一个有效的二叉搜索树。
有效 二叉搜索树定义如下:
节点的左子树只包含 小于 当前节点的数。 节点的右子树只包含 大于 当前节点的数…
编程日记
2025/1/16 10:09:19
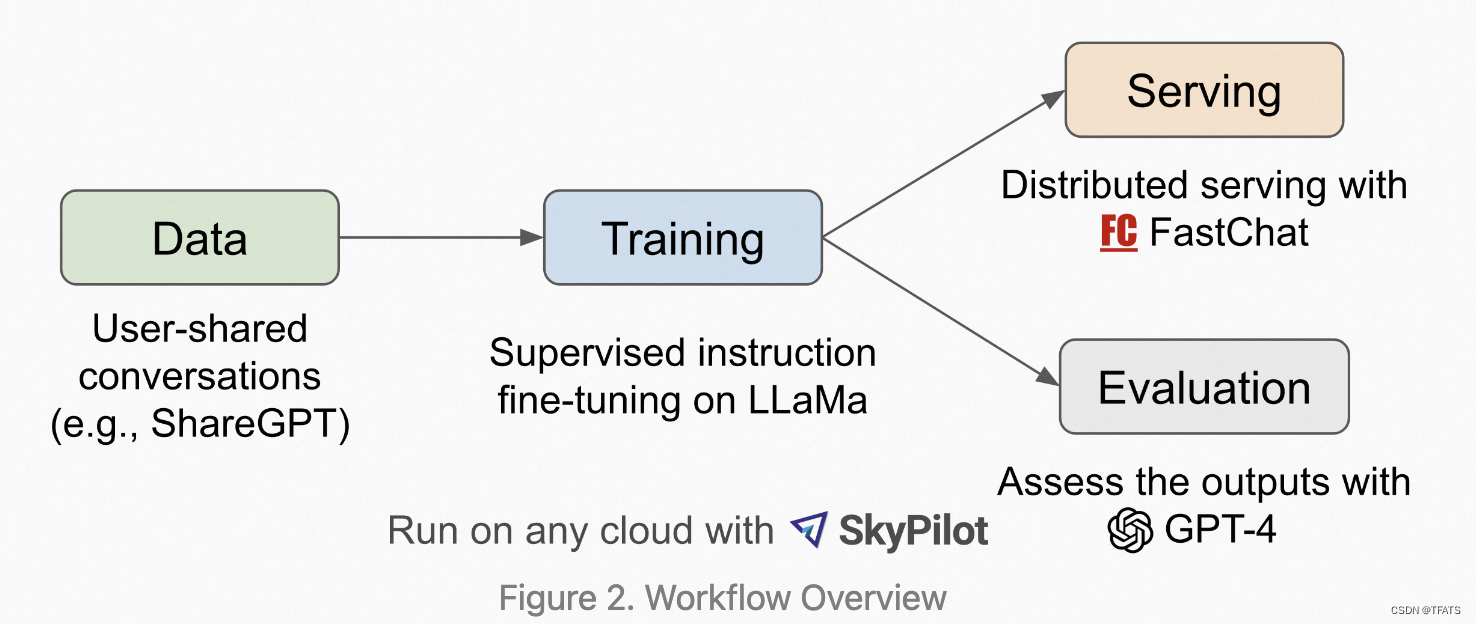
AIGC入门 - LLM 信息概览
本文将介绍以下 LLM
OPTLLaMaAlpacaVicunaMosschatGLMBaichuanOpenbuddy
一、OPT
1、背景
OPT全称Open Pre-trained Transformer Language Models,即“开放的预训练Transformer语言模型”,是 Meta AI 团队在2022年5月发布了开源大模型OPT-175B&#…
编程日记
2025/1/20 21:34:27

基于ROS环境的相机标定教程
一、参考资料
ROS学习——利用电脑相机标定
二、安装usb_cam驱动包
usb_cam - ROS Wiki GitHub - ros-drivers/usb_cam: A ROS Driver for V4L USB Cameras
usb_cam包用于读取图像。
1. 源码安装usb_cam
usb_cam用于实时SLAM,配合ROS平台使用。
1.1 下载usb_…
编程日记
2025/1/22 1:57:16

