相关文章

LeetCode热题100-合并两个有序链表【JavaScript讲解】
题目: 题解:
我们目前已经知道两条链表都是有序链表,我们就可以通过迭代的方法实现上述问题。当list1和list2都不是空链表时,判断list1和list2哪个头节点的值更小,将较小的值添加到结果里,被添加到结果里的…
编程日记
2025/3/16 16:31:35

1. npm 常用命令详解
npm 常用命令详解
npm(Node Package Manager)是 Node.js 的包管理工具,用于安装和管理 Node.js 应用中的依赖库。下面是 npm 的一些常用命令及其详细解释和示例代码。
镜像源
# 查询当前使用的镜像源
npm get registry# 设置为淘宝镜像源
…
编程日记
2025/3/16 16:33:57

【AUTOSAR 基础软件】软件组件的建立与使用(“代理”SWC)
基础软件往往需要建立一些“代理”SWC来完成一些驱动的抽象工作(Complex_Device_Driver_Sw或者Ecu_Abstraction_Sw等),或建立Application Sw Component来补齐基础软件需要提供的功能实现。当面对具体的项目时,基础软件开发人员还可…
编程日记
2025/3/16 16:29:16
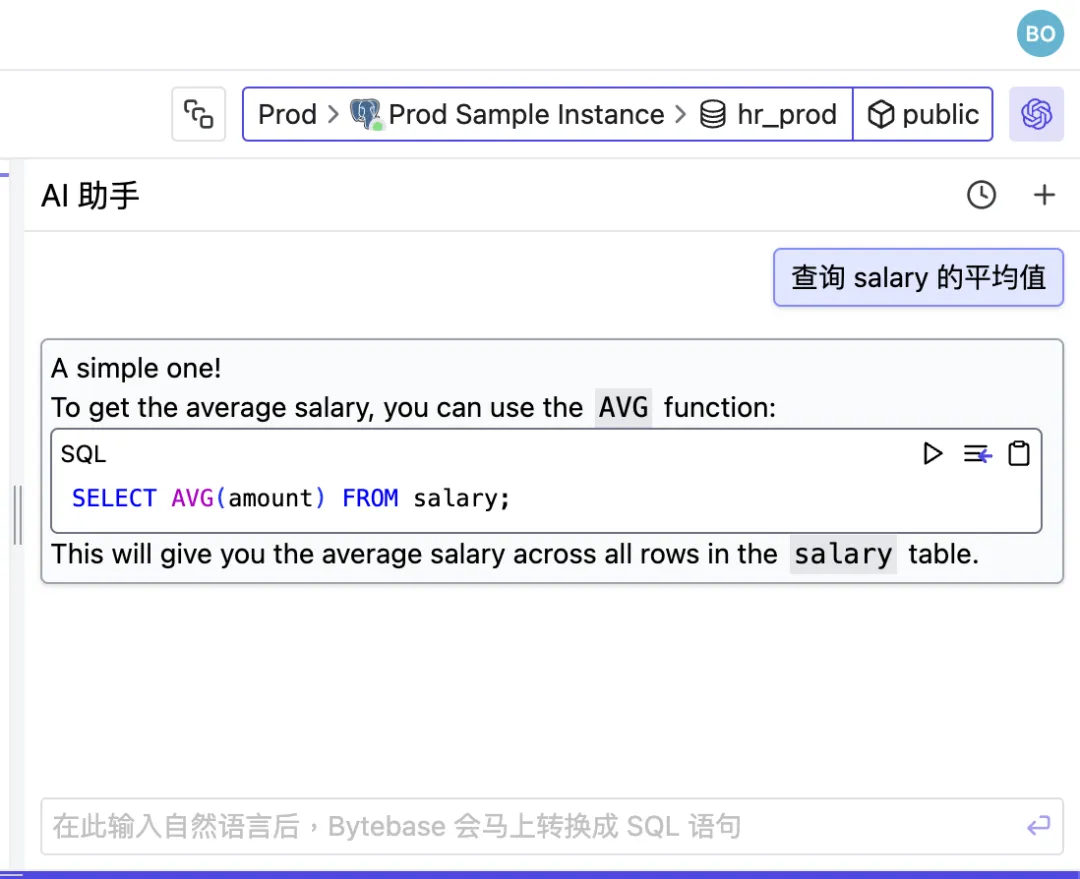
自然语言转 SQL:通过 One API 将 llama3 模型部署在 Bytebase SQL 编辑器
使用 Open AI 兼容的 API,可以在 Bytebase SQL 编辑器中使用自然语言查询数据库。
出于数据安全的考虑,私有部署大语言模型是一个较好的选择 – 本文选择功能强大的开源模型 llama3。
由于 OpenAI 默认阻止出站流量,为了简化网络配置&#…
编程日记
2025/3/15 3:00:04
25/1/12 算法笔记 剖析Yolov8底层逻辑
YOLOv8 是一种基于深度学习的目标检测和图像分割模型,属于 YOLO(You Only Look Once)系列的最新版本。YOLO 系列模型以其高效的实时目标检测能力而闻名,YOLOv8 在此基础上进行了一些优化和改进。
Yolov8的主要特点:
…
编程日记
2025/3/14 6:32:23

Webshell工具内网穿透
webshell权限(192.168.52.135)
冰蝎(Behinder)
socks隧道搭建
现在我们是拿到了webshell权限(192.168.52.135)开启本地端口监听
配置proxy代理 访问内网主机(开启了weblogic服务…
编程日记
2025/3/14 9:29:12

day39 面向对象特征之封装
仿照string类,实现myString
#include <iostream>
#include<string.h>
#include<cstring>using namespace std;class myString
{
private:char *str; //记录c风格的字符串int size; //记录字符串的实际长度
public://无参构造myString():size(0…
编程日记
2025/3/14 3:52:36

ROS Action接口
实现自主导航是使用Action接口的主要目的
在实际使用navigation导航系统的时候,机器人需要自主进行导航。不能每次都手动设置导航的目标点。所以需要编写程序代码来实现导航控制。这就需要使用到navigation的导航接口。Navigation的这个导航接口有好几个。Rose官方…
编程日记
2025/3/14 23:39:37

